
Blog - March 2013
Pre-SVR Day 15: Hanger Assembly
Hanger
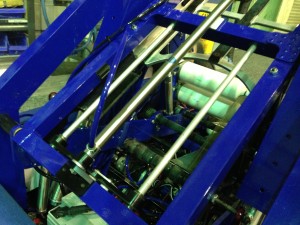
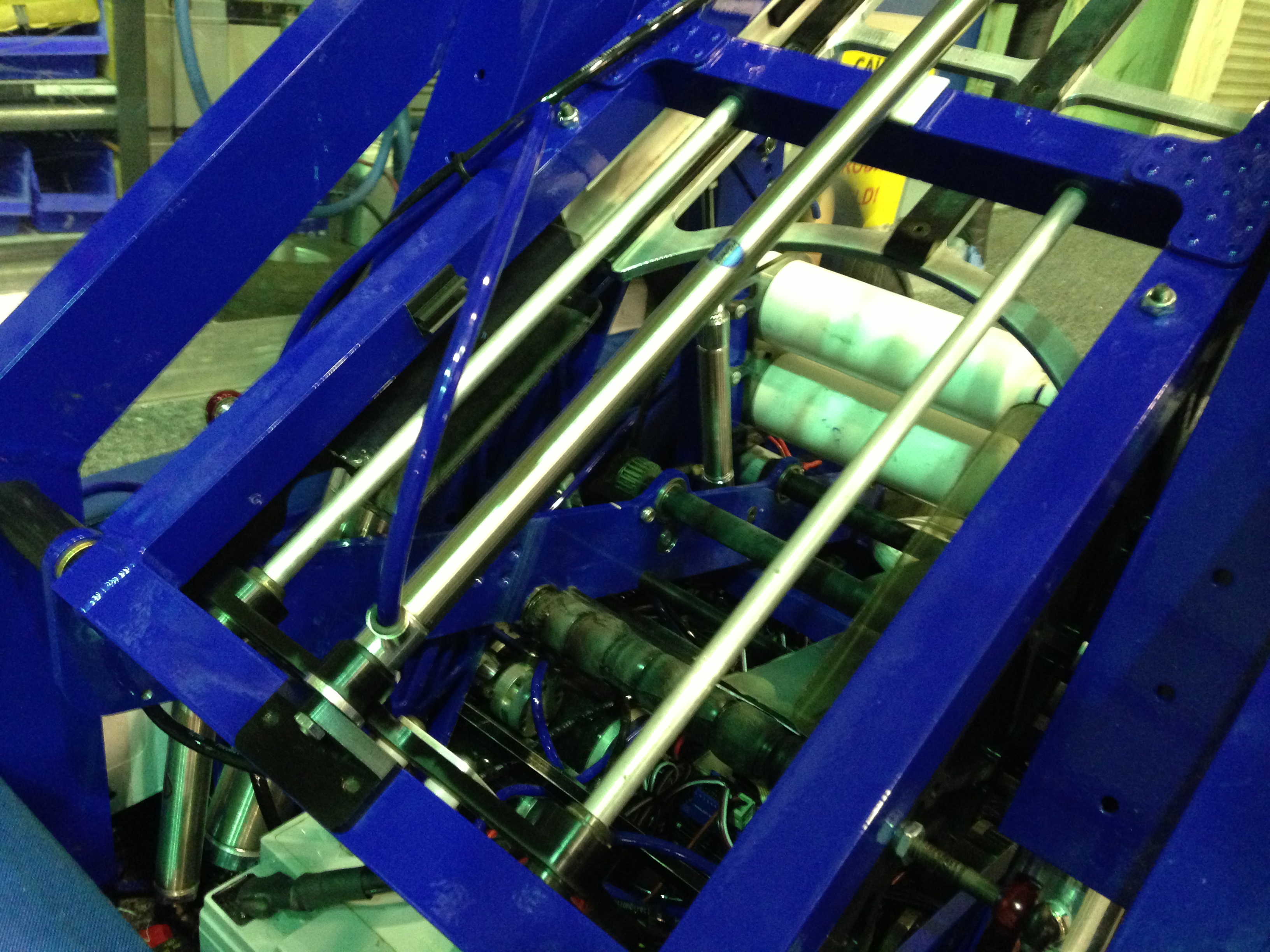
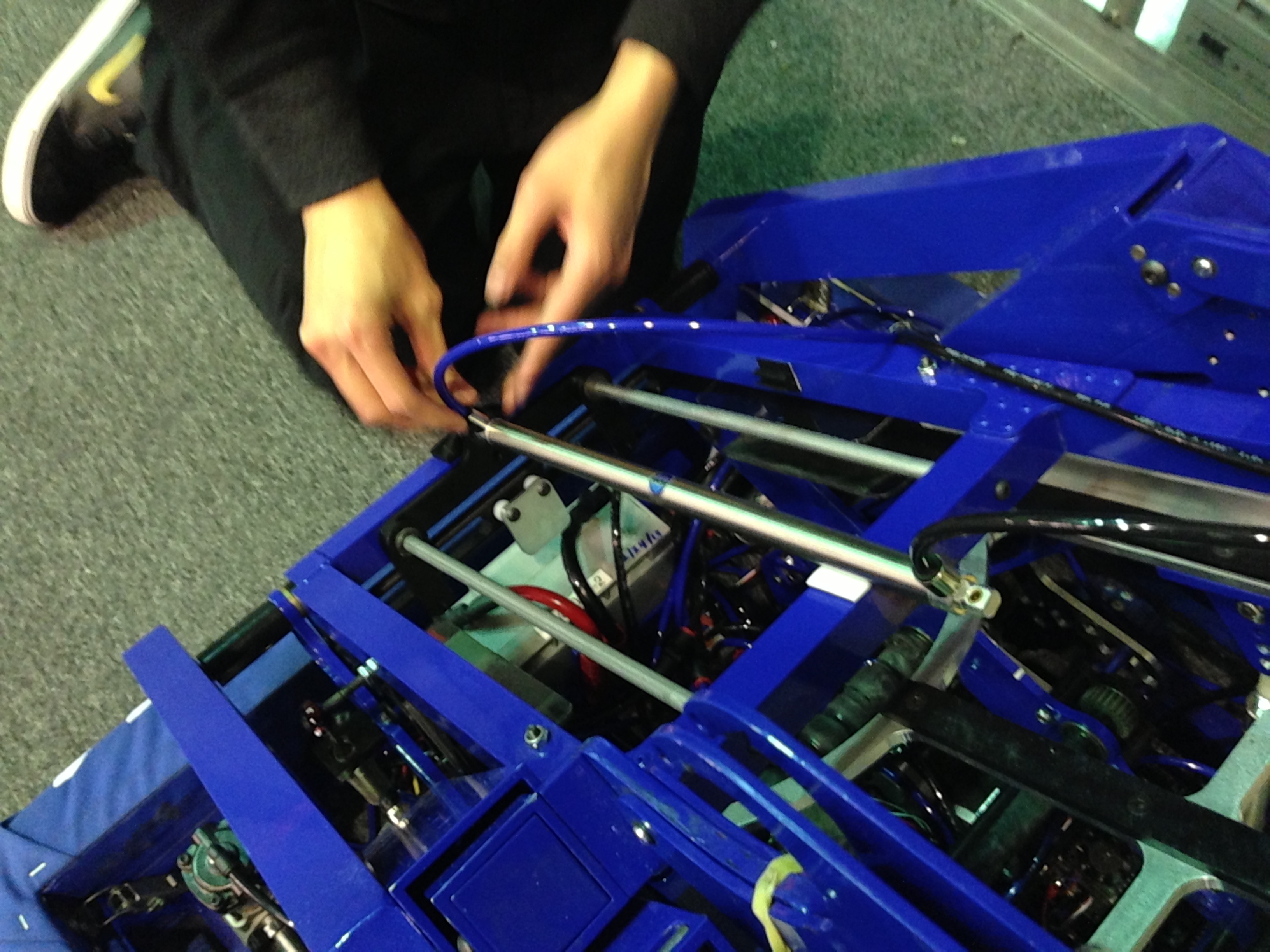
The highlight of today was beginning assembly of the hangers for the competition robot. We plan to finish fully assembling these soon. We are constructing 3 identical hanger assemblies so as to have one extra.

Jonathan Lee working to assemble the hanger.
Machining
We also made some new parts for the level one hanger on the CNC. This will soon be sent for powercoating The pocketed first stage parts are significantly lighter than they previously were. They also look quite pretty.
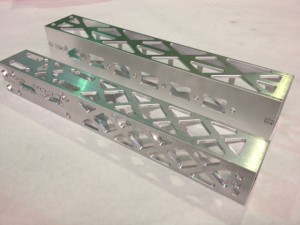
Some cool new parts for the level one hanger.
SVR Preparations
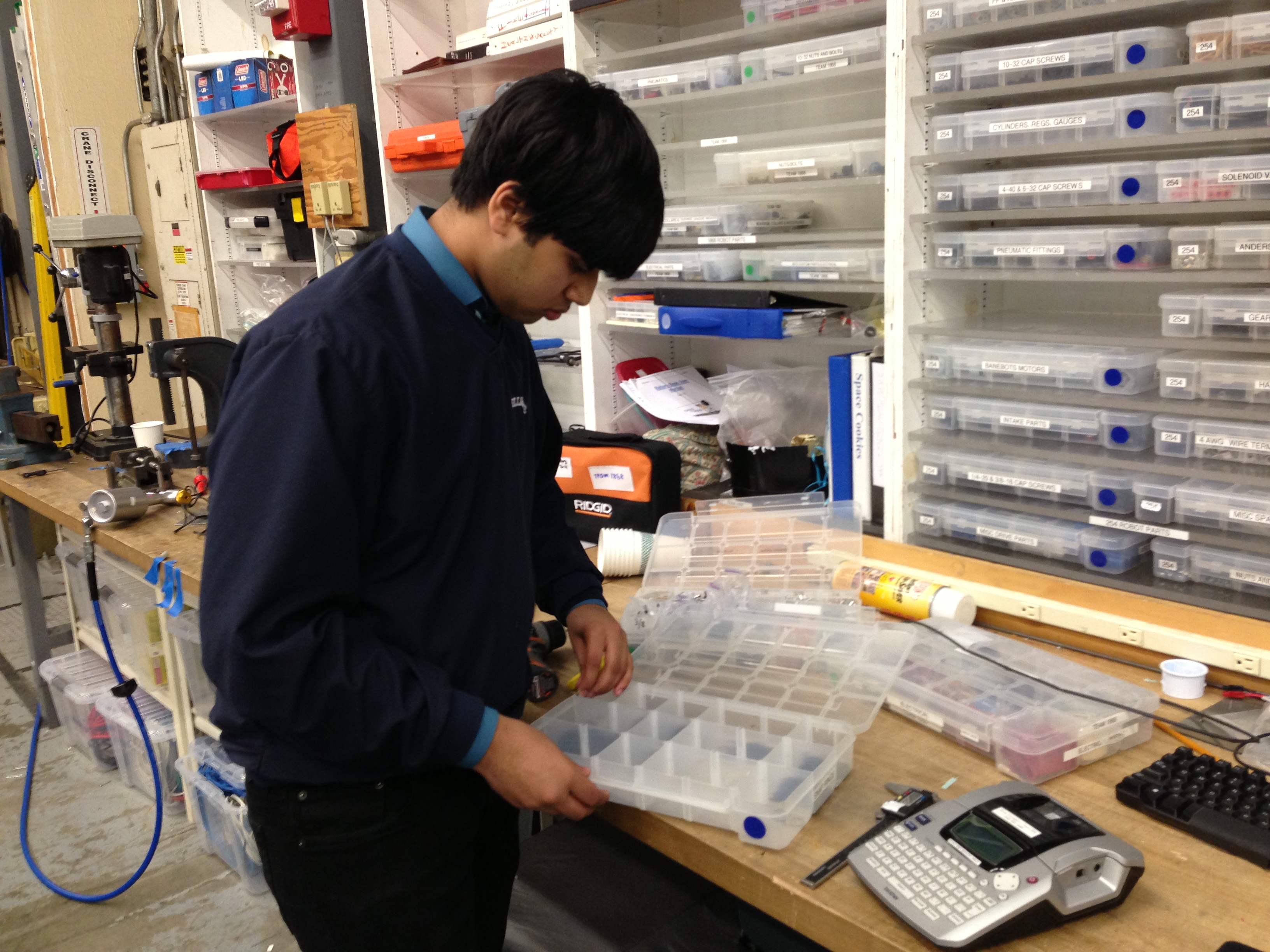
Students also worked on organizing supplies, tools, and equipment for SVR. The new clear bin system will make the pit significantly cleaner and easier to work in. We love organization (thanks T-Dog).

Supplies are packed and ready to go.
Programming
The programmers worked on fine tuning all of the autonomous modes: five-disc, four-disc, seven-disc, and center-disc. With a lot of tweaking, the consistency of the various autonomous sequences have improved greatly. However, late into the night, a shifting dog on the left gearbox of the drive train was completely shattered (yet again). As a result, the robot’s left drive won’t work until the dog is replaced.
Lab closing time: 2:00 AM
Overkill Teaser
On Wednesday, the team said that if we reached 2540 likes on our Facebook page or 2540 followers on our Twitter Account by April 3rd, a video of the world’s fastest 30 point hang would be released. The threshold was met on the Facebook page just a day later on Thursday the 28th.
This is that video.
Pre-SVR Day 14: Hanger Repair
Hanger
While testing the hang speed late yesterday, the hanger malfunctioned. While it was on the third level hang, one of the arms bounced and did not latch, leaving the robot hanging from one arm. This torqued that arm at an angle, the belt snapped, and left other minor damages. Today, the students and the mentors worked to put it back together. The belt was replaced, and it is back on the robot, and working well.

Shooter/Indexer
After a lot of driver practice lining up to take shots, the shooter’s consistency started to go down. Upon further inspection, one of the belts that was linking the two shooter shafts snapped and fell off the robot. In addition, the back shooter motor is shot. The robot still shoots the frisbees, but not up to the speed and distance it should be at.
Slipstream
Slipstream is now fully functioning. It will be used for programming purposes, sensor verification, and demonstrations.

Pre-SVR Day 13: Defense
 After a quick driver’s practice today, a programming issue occured with the autofire shooting. With the indexer physically jamming as well as the software causing jamming while shooting, practice was stopped and efforts were put towards making sure the robot was fully functional. After the programming and hardware issues were solved, drivers continued practicing.
After a quick driver’s practice today, a programming issue occured with the autofire shooting. With the indexer physically jamming as well as the software causing jamming while shooting, practice was stopped and efforts were put towards making sure the robot was fully functional. After the programming and hardware issues were solved, drivers continued practicing.
Intake
Last night, wooden support blocks were added to the practice robot’s intake to help keep the polycarbonate bottom plate pushed to the ground. No other modifications were made to the intake, and in its current state it is working moderately well.
Shooter/Indexer
The new indexer system that feeds one frisbee at a time has eliminated the issue of the indexer not fully engaging over the frisbee, which caused jamming (such as in San Diego). While testing today, frisbees were jamming below the indexer, which students quickly discovered was caused by a loose piston Tightening the piston solved any jamming issues. Continued testing of the shooter proved extremely improved consistency and power while using the new banebot motors.
Slipstream
Slipstream was brought to NASA from its home at the Bellarmine Robotics lab and repaired by students today. After being restored to driving condition and reprogrammed by students, it is up and running and ready to be used to practice defense. Students and mentors will drive Slipstream as a defensive robot while the drive team runs drills with Overkill to give a more realistic situation and challenge them to adapt to a multitude of different scenarios.

Competition Preparation
In preparation for SVR, students populated a list of supplies to buy, as well as continued to organize the current list with new bins that were bought. By separating the different supplies into individual bins the process of pit setup will be streamlined, as well as creating a more organized pit overall.
Pre-SVR Day 12: Regroup and Rethink
 After ten minutes of driver practicing, the team still determined that one glaring problem still exists that currently precedes all others: the robot’s intake system inconsistently picks up frisbees.
After ten minutes of driver practicing, the team still determined that one glaring problem still exists that currently precedes all others: the robot’s intake system inconsistently picks up frisbees.
Intake
The team technical leaders gathered to decide on a solution for the intake problem.
Issues:
The daunting issue ahead
- Frisbees stack on top of each other inside shooter indexer
- Intake shelf/ramp causes discs to stall
- Whether or not bottom roller should be used
After a comprehensive discussion about the next step, the team concluded that the next step would be to revert back to the old intake and iterate from there.
Solution to test:
- Remove frisbee ramp
- Replace bottom roller
Shockwave
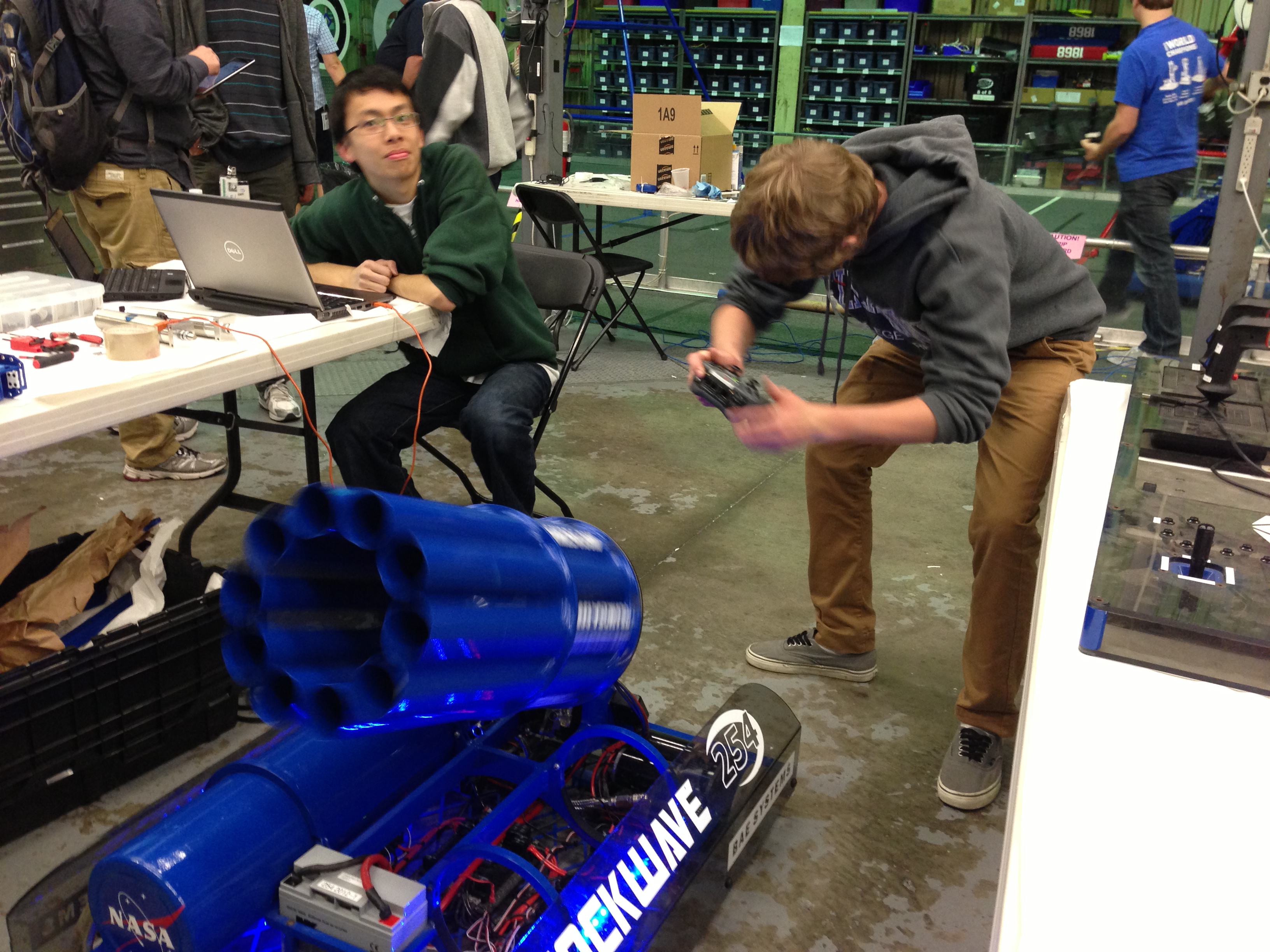
Further development of the T-shirt cannon, Shockwave, was continued today, led by Richard Lin. The programming team added the indexing code which rotates the barrels for the next shot. Controls are still under maintenance to ensure safe and proper performance during exhibitions. This will require extensive robot testing by mentors before it can be used in public.

Students developing the controls
Code Testing
A heroic perspective of Shockwave

Tom is impressed
Pre-SVR Day 11: Intake Redesign
Intake
The team is currently working on redesigning the intake to intake discs more effectively. There are multiple issues with the current iteration, such as stacking when intaking multiple discs. As of now, students are experimenting by attaching two small Banebots wheels in the front roller shaft. In addition, they have added a polycarbonate ramp that slants upward into the robot. Once the intake is fully designed and works reliably, the programmers can test their autonomous modes.
Shooter
The shooter is currently under construction, and removed from the robot. Students manufactured more parts for the shooter. For instance, they created shafts using the lathe and bandsaw.
Programming
The programmers continued to fine-tune and modify the seven-disc autonomous sequence. Specifically, they made adjustments to the robot's driving and intaking. Since the shooter is currently detached, no shooting was done or tested.
In other news, the programmers had some connection and network troubles with robot, driver station laptop, and programming laptops. The robot's connection with the driver station occasionally drops for about a second. Additionally, the programmers were unable to FTP to the robot to deploy code while the driver station laptop was connected to the robot. Students and mentors tried to debug the situation for a long time, but were unable to pinpoint the issue. They will look further into the problem in the coming days.
Food
The students also enjoyed some delicious BBQ for dinner, as well as ice cream for a late night delight.
Pre-SVR Day 10:

Indexer
The polycarb flap that indexes the frisbee was modified to be thicker. The indexer superstructure was changed and we reverted to old butcher knife plates to lower compression on the disc. The default state of the indexer was also changed from the bottom to the top. The team is making these modifications to increase the rate at which the robot shoots discs.
Wheels
Team members took apart old wheels, cleaned them up and removed old rivets and tread. The wheels were not re-treaded.
Sensors
Members started wiring the photoelectric sensors for the shooting and indexing sequence. This would optimize and speed up rapid firing as well as autonomous mode.

Media Technology and Innovation Award Submitted
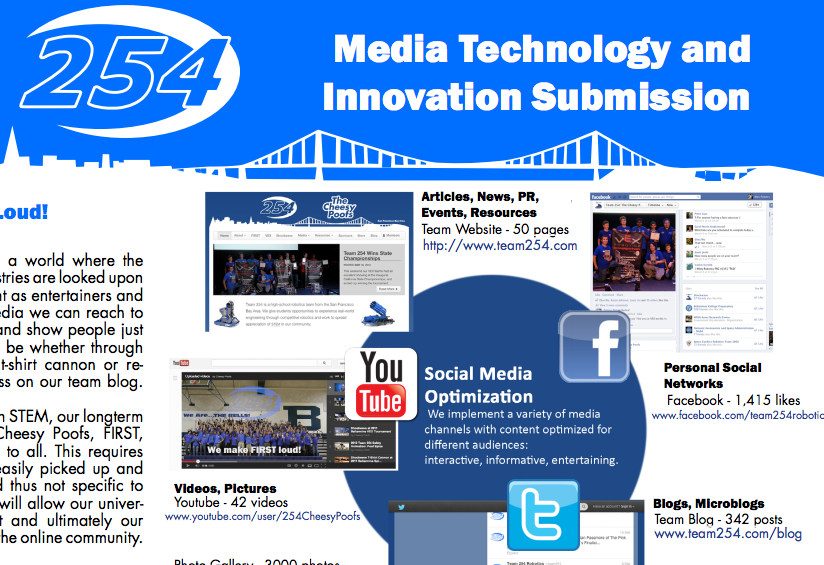 Thanks to the collaborative effort of many students and mentors, Team 254 finished and uploaded our submission for the Media Technology and Innovation Award. The new award, essentially replacing the website one, focuses on social media presence and the team's plan for approaching social networking.
Thanks to the collaborative effort of many students and mentors, Team 254 finished and uploaded our submission for the Media Technology and Innovation Award. The new award, essentially replacing the website one, focuses on social media presence and the team's plan for approaching social networking.
It was submitted as a 2 page PDF, which we found to be an interesting constraint. In the end, we found that using graphics to communicate our ideas was often more effective than using text, and more engaging for the audience. This also made it difficult to decide which text to cut from the document, and how to balance the types of content effectively.
Thank you to all of the dedicated members who helped put this together, specifically Eric Van Lare, Alex Powers, Avery Strand, Kyle Schnoor, and Chanan Walia under the guidance of Esteban Parker and David Wilson.
Pre-SVR Day 9: Edgy Intake
Overkill:
Tests were conducted using a knife-edged polycarbonate sheet added to the bottom of the intake tonight in order to improve the effectiveness of the intake system. New rails have been integrated into the shooter system. The tests are still underway and there have not been any conclusive results yet.
Shockwave:
Due to issues with establishing connection to the robot students replaced the old cortex and troubleshooted faulty wiring. There is still work to be done and students will continue to work to make Shockwave functional again.
Sponsor Invites:
Invitations to the Silicon Valley Regional were sent to almost all of our sponsors tonight.
Pit Lighting:
Pit members worked on creating an easier means to set-up and transport the LED strips used for Pit lighting. Their fragility and difficulty to set up significantly complicates setting up the pit Thursday morning.
Pre-SVR Day 8: New Shooter
Driver Practice
Today Driver Abhi Kumar and Backup Operator Jonathan Lee were able to get a lot of practice with the robot. Additionaly, Human Player Aaron Johnson was also able to practice with the drive team.
New Shooter
Students and Mentors began manufacturing and assembling the new shooter today. This shooter incorporates BaneBots 550 motors instead of Mini-CIMs, which were previously used on the shooter before. Students began by manufacturing spacers for the motor housing plate using the lathe and spare spacers from last year’s gearbox. They then worked on manufacturing the shafts for the wheels on the shooter. The components of the shooter were then put together and tested using the new shooter plates that were manufactured today.
Pre-SVR Day 5: Autonomous Hanging
Hanging
 Today, the programmers focused on making the 30-point hanging fully autonomous. This makes the climber run with a push of a button (specifically, a switch and a button). They started the day off by tuning the PID for the upward hanging by using a square wave to visually see the hanger hooks moving upwards, looking for consistency and accuracy in each cycle. In addition, they used an additional gyro that would measure the pitch and rate of change of pitch to determine when to fully extend the hanger. The programmers also noted the raw encoder ticks for each position of the hanger claws: right underneath the next rung, fully extended above the rung, and fully retracted. With these numbers, a new command was born: AutoHangCommand.
Today, the programmers focused on making the 30-point hanging fully autonomous. This makes the climber run with a push of a button (specifically, a switch and a button). They started the day off by tuning the PID for the upward hanging by using a square wave to visually see the hanger hooks moving upwards, looking for consistency and accuracy in each cycle. In addition, they used an additional gyro that would measure the pitch and rate of change of pitch to determine when to fully extend the hanger. The programmers also noted the raw encoder ticks for each position of the hanger claws: right underneath the next rung, fully extended above the rung, and fully retracted. With these numbers, a new command was born: AutoHangCommand.
With the current delay logic, the team was able to get around 8.3 to 8.5 seconds per fully autonomous climb. Though fast, the duration of the climb can be shortened and optimized by adjusting the logic. Below is a video of a faster climb:
Tune-Ups
 In order to optimize and fix the seven-disc autonomous sequence, the team worked on testing the intake and indexer so that they are reliable enough to use for autonomous. However, the team is currently investigating problems with the shooter. They believe that the bearings need to be replaced.
In order to optimize and fix the seven-disc autonomous sequence, the team worked on testing the intake and indexer so that they are reliable enough to use for autonomous. However, the team is currently investigating problems with the shooter. They believe that the bearings need to be replaced.
Team 254 Wins State Championships
This weekend our VEX teams had an excellent showing at the inaugural California State Championships, and ended up winning the tournament.
Five of our seven VEX teams attended State Championships: A, C, D, F, and G. The teams did well throughout the morning and noon in the qualification matches, with several great highlights throughout the day. For instance, C set the tournament high score, scoring 300 points in a single match; D won a 1 v 2 match alone when their alliance partner was disqualified; and D had the unique distinction of being the only team (out of 48) to go undefeated, earning a perfect 8-0 record and seeding first. In the afternoon, alliance selections happened and 4 of the 5 teams made it into eliminations. D, being first seed, was an alliance captain and chose as its partners 5369 (Fire Breathing Rubber Duckies) and 21C (SPUR-FLYS). C and F were both picked by 6A (Cyber Phoenix), while G was picked by 5327 A and C (Gael Force).

The afternoon was filled with exciting elimination matches. The C/F alliance lost in quarterfinals, while the G and D alliances each won semifinals to face each other in a Poof-on-Poof finals match. It was an exciting finals match indeed, going into a third tiebreaker match when each alliance won one round. Eventually, the D alliance pulled off the win, giving Team 254 the State Champion title, as well as qualifying 254D for World Championships.
//www.youtube.com/watch?v=qNgbmuPKrxQ
Finals Match 1
//www.youtube.com/watch?v=6XNle0v7M5c
Finals Match 2
//www.youtube.com/watch?v=q7iumjyoGKM
Finals Match 3
In addition to winning the tournament, D also won the Amaze Award for their reliable performance and outstanding programming.
We are proud of our excellent performance at State, and the success has certainly prepared us for the upcoming World Championships.
Pre-SVR Day 4: Level 3 Hang
Programming and Controls
Most of the afternoon was focused on driver practice and controls testing. Pat and Tom worked on reducing the time between shots. They were able to make the indexer go significanly faster, reducing our shooting time by a few seconds. There were a few issues, primarly, the indexing flap made of polycarb broke twice. It is currently unsure why this happened and whether or not it will continue to happen. Overall, the programmers made huge progress.
Third Level Hanger
The evening was focussed on making the hanger work. After two days spent making two new sets of gearbox plates, the hanger was ready to assemble. To do that however, the entire robot needed to be disassembled. The superstructure and the hangers were removed from the drivebase. After finding all the gears and spacers, the new drive gearboxes were ready to be assembled. The gearboxes were taken apart, and the new ones assembled. After that, the superstructure was assembled and the robot was ready to hang.
Here is a video of it in action:
Lab Closing Time was: 2:30 AM
VEX State, Day 1
Today was the first day of VEX State Championships, though no actual competition took place. Instead, today was a day for practicing alongside other teams and debugging any residual robot problems. We started the day by registering our teams and getting the robots inspected, thus saving us time tomorrow. Once that was done teams prcoeeded to test their robots on the 2 tournament practice fields, identifying and eliminating bugs along the way. We did this all afternoon (2:00 to 7:00), and it was certainly one of the most productive days we’ve had. Everybody has ironed out the kinks in their designs and we are looking forward to competing tomorrow.
Pre-SVR Day 3: Organization and Autonomous
The first few days after a tournament are usually pretty relaxing, but they are also just as busy (if not more) than other days. Today, there was a large organization effort to empty the last few bins of tools and parts that were brought to competition. The main focus of this clean up effort is to find a way to organize spare parts and “competition ready parts.” There was a huge dissary between what was ready to be assembled and tested, and what still needed to be manufactured. That effort will be completed tomorrow.
Manufacturing
Cory worked on the CAM for the new gearbox side plates. The CAM and hopefully the manufacturing of these plates will be completed tomorrow. Once this new gearbox plate is complete, the hanger can be assembled and tested. However, the assembly for this is very complicated and time consuming. The super structure will have to be removed, the gearboxes replaced, and a few new spacers made.
Autonomous
Tom and Pat worked on tuning the autonomous modes. They autonomous modes are working significantly better. The next step is tuning the indexer to shoot faster
2013 San Diego Regional Winners!
 After a difficult six-weeks of design and construction, Team 254 wins the San Diego Regional with Alliance Captain Team 987 and Alliance Partner Team 1138.
After a difficult six-weeks of design and construction, Team 254 wins the San Diego Regional with Alliance Captain Team 987 and Alliance Partner Team 1138.
This past Wednesday, thirty students rode a bus down to San Diego to compete in the annual San Diego Regional (March 7th – March 9th). The team unloaded the bus on Wednesday night and went to the hotel after dinner. We also set up the pit and implemented many changes to the robot from our work on the practice bot.
Thursday: Day 1
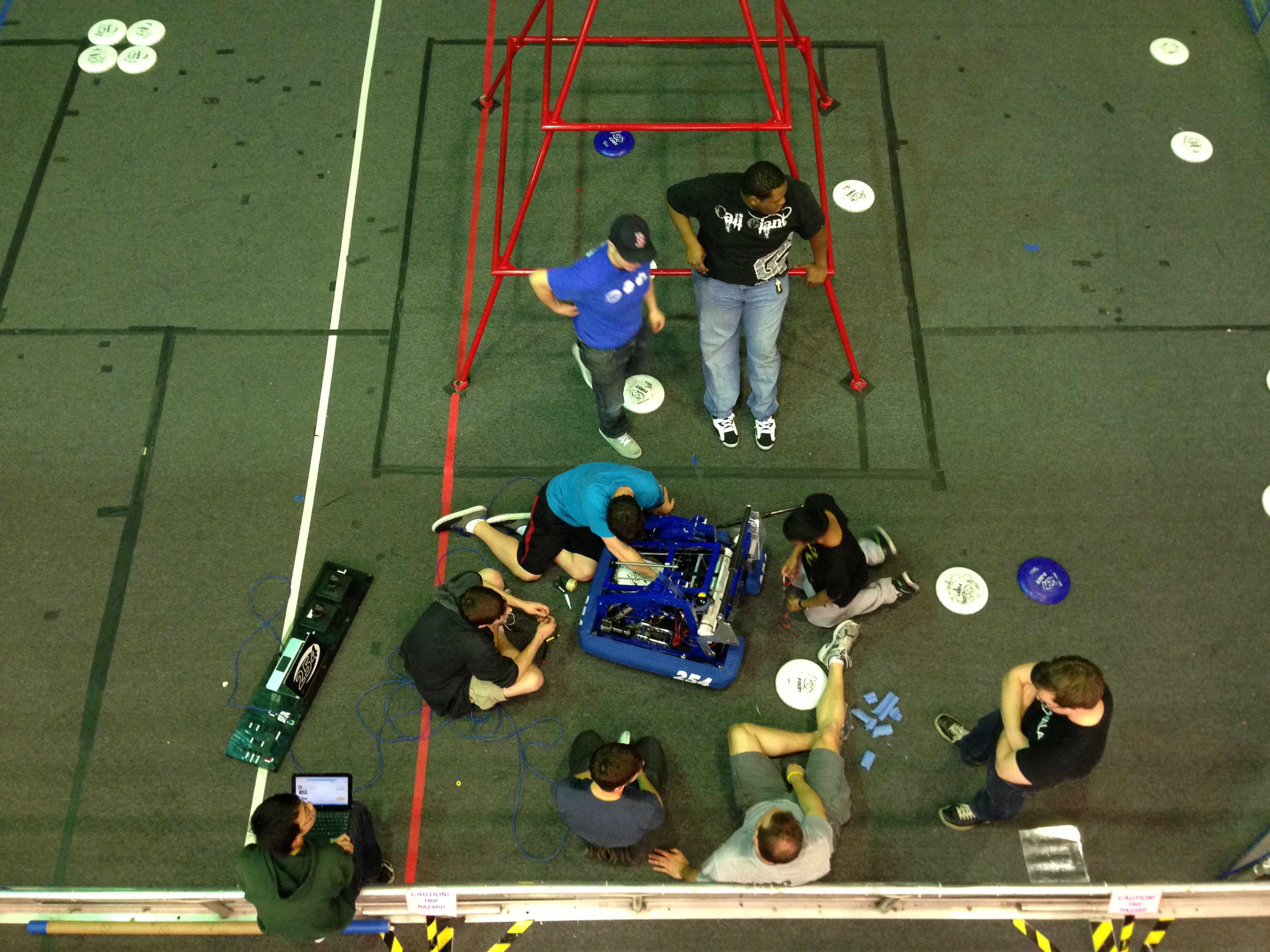
Two years ago when we attended this regional, the venue had poor lighting and many people got frustrated by working in an unlit area. With the help of family members and new sponsors, we were able to acquire trussing and lights to illuminate the pit. It was a very impressive sight for the tournament attendees and a wonderful area to work in. We plan to continue working on the pit design to utilize the beautiful trussing to its maximum potential. Below is a picture of students and mentors working the newly designed pit area:
We further implemented many changes to the robot. For example, we added the new shooter with the new speed reductions and mini-CIM motors, changed the pulleys on the conveyor to increase the speed, added the level one hangers, and changed the intake to reduce jamming. The robot spent a lot of time on the practice field to ensure that all the bugs were ironed out. Unfortunately, there were still many more issues that needed to be fixed.
Friday: Day 2
On Friday, we had a rough start with qualification matches. After many struggles with shooter inconsistencies, sensor malfunctions, and autonomous bugs, we ended the day with a fantastic match. The last match on Friday demonstrated to the competition what we were capable of. Our alliance scored a tournament high score (at the time) of 153 points. The video will be posted soon.
Saturday: Day 3
 Saturday’s matches went well. During lunchtime, we were aproached by Team 987 (The High Rollers) from Las Vegas, as they wanted to ensure maximum compatibility on the field between the two robots to guarantee a tournament win. Thus, we demonstrated our multiple autonomous modes to them on the practice field. At the alliance selections, Team 987 picked us, Team 254, as a second pick. Our third pick was team 1138, Eagle Engineering from Chaminade College Preparatory. After intense quarterfinal and semifinal matches, the joint pit crew from 987 and 254 added an effective blocker made of pool noodles to 1138’s robot (also known as pope-bot), pictured below. This was to defend against a full court shooter which could have been a deadly scorer during the finals if 1138 hadn’t defended so well.
Saturday’s matches went well. During lunchtime, we were aproached by Team 987 (The High Rollers) from Las Vegas, as they wanted to ensure maximum compatibility on the field between the two robots to guarantee a tournament win. Thus, we demonstrated our multiple autonomous modes to them on the practice field. At the alliance selections, Team 987 picked us, Team 254, as a second pick. Our third pick was team 1138, Eagle Engineering from Chaminade College Preparatory. After intense quarterfinal and semifinal matches, the joint pit crew from 987 and 254 added an effective blocker made of pool noodles to 1138’s robot (also known as pope-bot), pictured below. This was to defend against a full court shooter which could have been a deadly scorer during the finals if 1138 hadn’t defended so well.
In a nail-biting final match, the 987-254-1138 alliance won, earning the title of 2013 San Diego Regional Champions.
Final Awards and Tournament Win
 After the final matches, we were awarded the Quality Award sponsored by Motorola and the Tournament Winners at the award ceremony. We would like to congratulate Team 1538: The Holy Cows on a well-deserved Regional Chairman’s win, and Rodger Dohm from Team 1622 on a Regional Woodie Flowers award.
After the final matches, we were awarded the Quality Award sponsored by Motorola and the Tournament Winners at the award ceremony. We would like to congratulate Team 1538: The Holy Cows on a well-deserved Regional Chairman’s win, and Rodger Dohm from Team 1622 on a Regional Woodie Flowers award.
Next Steps
Overall, the 2013 San Diego Regional was a well-run and successful tournament. The next step is preparing for the Silicon Valley Regional in April, which is arguably the most competitive regional of the year. There are a few identified changes that need to happen to the robot which include shooting and indexing faster, adding our 30-point hanger, and tuning autonomous modes.
SVR, here we come!
Build Season Recipes: Strategy Brownies
These delicious and nutritious brownies have powered many Friday night picklist meetings on multiple teams, and more often than not have led to regional and divisional victories. This past weekend in San Diego was no different.
Strategy Brownies
-
1 cup butter
-
1-1/3 cup sugar
-
1 cup brown sugar
-
4 eggs
-
1/4 cup milk
-
1-1/3 cup flour
-
1 tsp. baking powder
-
1/2 cup creamy peanut butter
-
1 cup peanut butter chips
-
1/2 cup cocoa powder
-
1 cup chocolate chips
Cream butter and sugars. Add eggs and milk; beat. Mix in flour and baking powder. Divide batter in half. In one half, mix in peanut butter and peanut butter chips. In the other half, mix in chocolate chips and cocoa. Place alternate spoonfuls of batter into a 9-inch square pan, creating a checkerboard pattern. Swirl a knife through batter to create a marble effect. Bake at 350°F for 30-35 minutes, or until an inserted toothpick comes out with fudgey crumbs.
San Diego Regional in Progress
Our team has arrived in San Diego in one piece, and is doing great. The pit is set up, we’ve passed inspection, and apparently, the waffles at the hotel are amazing. If you’re looking for quick updates, our team Facebook page is a great place to look, you will be able to find pictures, statuses, and updates on team. Additionally, if you’d like to watch the games live, head over to
//www.justin.tv/frcsd?utm_campaign=live_embed_click&utm_source=www.thebluealliance.com
Here, you’ll be able to watch the livestream of the event, from qualification rounds to finals. It will open up at 8:30 AM PST Friday (March 8th), so be sure not to miss any of the action!
Wish us luck, and go Poofs!
Autonomous Tuning
Manufacturing
Students manufactured the polycarbonate flaps for the indexer using the vertical bandsaw, among other miscellaneous parts.
Programming
Today, the programmers did a lot of fine-tuning and testing with the various autonomous sequences. The seven, five, and four disc autonomous modes were further refined. The programmers tweaked the distances, powers, and a couple other factors of the drive and shooter. In the end, they were able to have a consistent 7, 5, and 4 disc autonomous. They played around with seven-disc autonomous sequence’s speeds and distances to get it under the fifteen second time limit.
Meanwhile, the programmers started work on a new autonomous mode that would start out by one of the pyramid’s back corners, shoot three discs, drive backwards and turn at an angle to align with the center line, pick up two center line discs, drive to the back of the pyramid with the first-stage hangers extended, and then shoot those three discs.
Action Items
- Pack for San Diego
- Center line autonomous testing
- Driver practice
Lab closing time for the night was 2:00 AM
Driver Practice and Intake Modification
Driver Practice:
 Drivers and operators continued practice today in preparation for the upcoming San Diego Regional. To hone their skills they ran a multitude of drills with a wide variety of obstacles to simulate a field filled with other robots. In these drills the drive team is fed 1 frisbee at the near side of the field, they then move as fast as they can to the opposite side without hitting any obstacles and shoot alternating between near and far pyramid shooting positions. If they fail to do this or hit any obstacles, there is a penalty of 5 pushups per violation, enforced by Mr. EJ.
Drivers and operators continued practice today in preparation for the upcoming San Diego Regional. To hone their skills they ran a multitude of drills with a wide variety of obstacles to simulate a field filled with other robots. In these drills the drive team is fed 1 frisbee at the near side of the field, they then move as fast as they can to the opposite side without hitting any obstacles and shoot alternating between near and far pyramid shooting positions. If they fail to do this or hit any obstacles, there is a penalty of 5 pushups per violation, enforced by Mr. EJ.
Robot Intake and Maintance:
 The side plates for the new intake design were completed today. Students worked with mentors to install the new plates as well as modify parts of the old intake to work with the new design. While it was not a very smooth action the new intake works much better, showing no obvious signs of jamming when intaking at slow speeds. As well as funneling better, the new intake also weighs 3-4 pounds less than the previous design. Students also removed unused pistons and sensors from the indexing system to shed weight.
The side plates for the new intake design were completed today. Students worked with mentors to install the new plates as well as modify parts of the old intake to work with the new design. While it was not a very smooth action the new intake works much better, showing no obvious signs of jamming when intaking at slow speeds. As well as funneling better, the new intake also weighs 3-4 pounds less than the previous design. Students also removed unused pistons and sensors from the indexing system to shed weight.
Bill of Materials:
Students continued the documentation process by separating the robot into subsystems and accounting for each part on the bill of materials. With the constant iterating of the robot, they will have to keep the list updated every day. Currently, they have almost fully completed documenting 5/6 subsystems, consisting of the intake, conveyor, shooter, hanger, and bumper. The drivebase is still a work in progress.
Programming:
The programmers debugged code for the robot’s drive. Other than this, they added support of the control loops switch on the control board to how the indexer command operates. Also, the programmers rewrote the logic for the stage 1 hanger solenoids.
Pit Lights
Other programmers worked on the pit display and colorful pit lights. These lights will be installed in the trussing in the pits to add a glow effect to the piping. They took last year’s match schedule script and modified it to remove the Coopertition points column, as well as to create a configuration form so that other teams can utilize the system. They also worked on the web application that will send led script files to the C# application that controls the lights. It will be done soon.
General Competition Preparation:
Students finished wiring the new 2013 batteries tonight and are currently in the process of testing them. Using a battery analyzer each battery is tested to see the quality individually before competition.
