
Build Blog Days 2 and 3 (1/8/18 – 1/10/18)
Drivebase
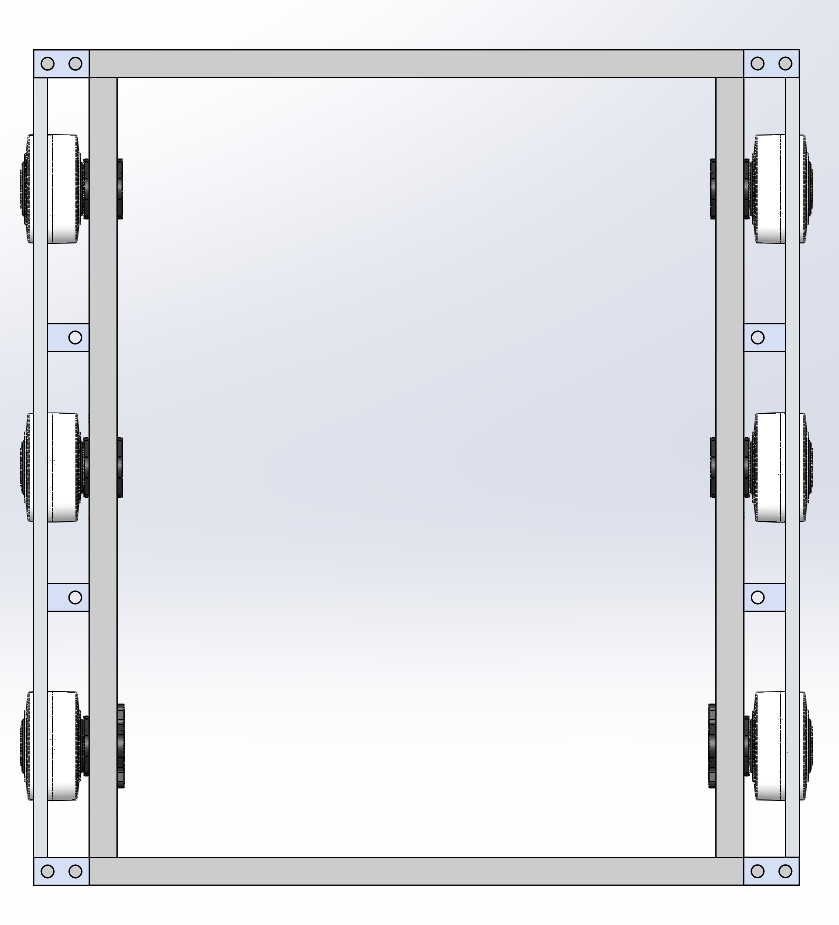
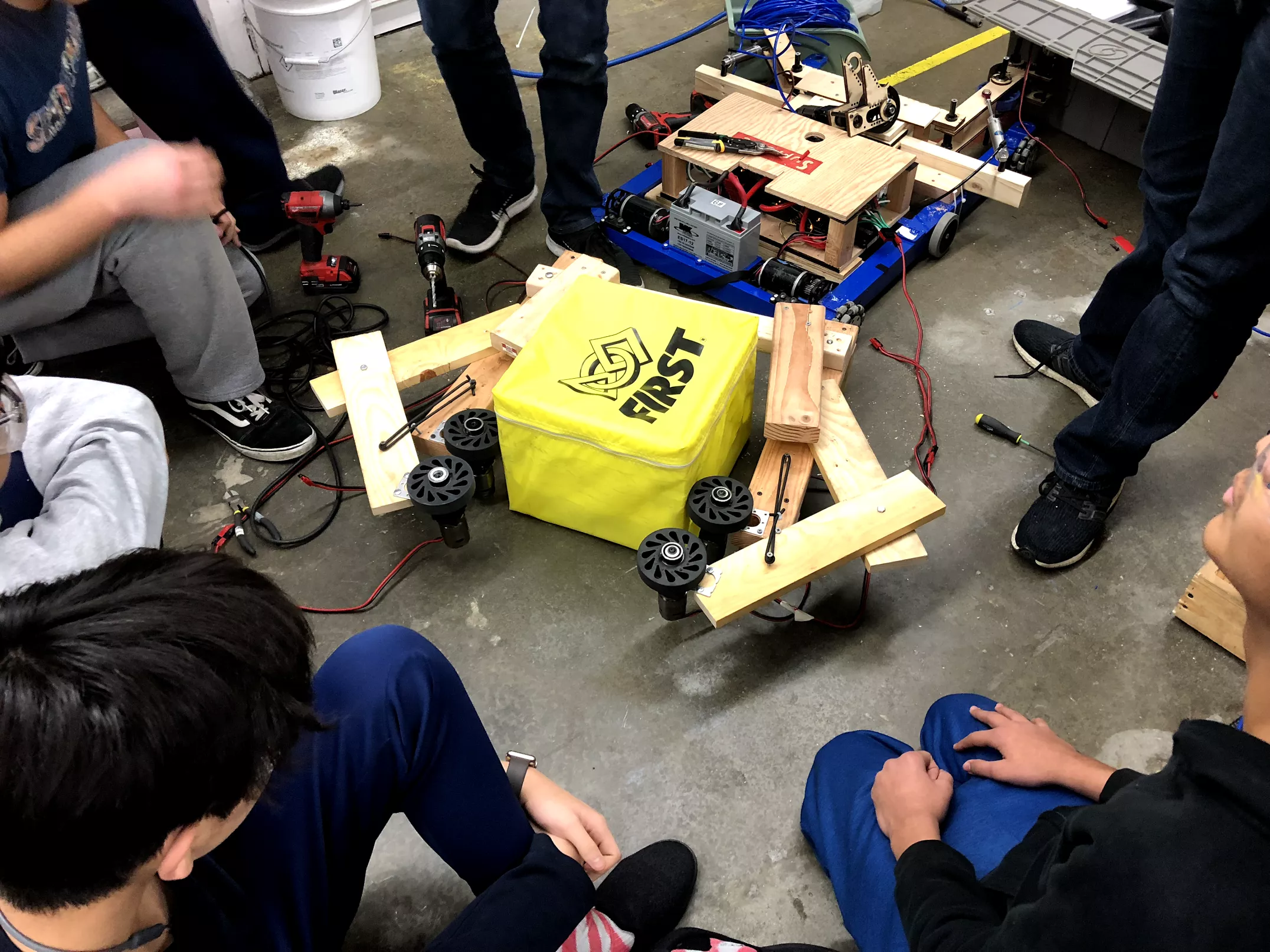
Task: Test drivebase with modelled dimensions (28"x33") 1.15” center drop; from top of frame rail and placed 2.5” from the front and back of the drivebase frame high centering on the ramp at various angles.
-
When approaching the ramp perpendicularly, the robot clears the ramp and does not high center. However, when it approaches at angle towards the corner of the platform where the front and side ramps meet, it high centers. Also, when the robot is travelling up the ramp with the cable protector below it, The back of the drivebase frame contacts the cable protector and high centers on it. The drivebase modelled with these dimensions in CAD accounts for a 16 tooth sprocket with chain OD and a 0.1" clearance between the sprocket-chain OD and the baseplate. In addition, the 4" colson wheels used are actually 3.9" wheels. If we were to bring the sprocket lower to the baseplate and use fully 4" wheels, there is a possibility it would not high center. We need to investigate the lowest we can go with the sprocket-chain OD and test with new 4" wheels. Additionally, these results may change our driving strategy where we will only attempt to go up the ramp perpendicularly. See these videos to see the drivebase in action.
Task: CAD drivebase weldment and begin work on drivebase assembly
-
We designed the drivebase frame rails such that the wheel placement and center drop can be easily modified as they are yet to be finalized. We went with our traditional West Coast Drive using 4” colson wheels. Assuming we will want to carry our partners while climbing, we need to beef up our drivebase, whether it be using thicker box tubing or by adding cross members. We will perform a bending calculation on different sizes of box tubing to determine what is the best size to use. Regarding bumper mounts, we currently see to ways to approach the task. The first way is a 2014 style bumper mount with latches on the drivebase frame that latch onto mounts on the bumper. The second way is a 2017 style bumper mount that uses guiding rods that go into the drivebase frame and some other latching system. The 2017 is definitely a harder bumper mount to work with, however, the straight face with mounting provisions may prove useful if we decide to deploy ramps for our partners to climb up on. We will investigate this in a cartoon CAD.
Task: Drivetrain gearbox design
-
We decided on a triangular configuration of mini-CIMS, with ratios that yield about 10ft/s and 18.6 ft/s. We are now trying to figure out how to package the shifter cylinder into the gearbox below the CIMs. We are exploring either a smaller bore cylinder or a nose-mount piston instead of pancake. Changing from 3/4 to 9/16 bore reduces the shifting force from 22lb to 11lb; Further testing is needed to see if this is enough force to shift. Regular air cylinders can be used if it is ok that they stick out longer than the CIMs. The next steps are to finalize which shifter cylinder we want to use, model the rest of the gearbox plate, and then detail in the entire gearbox assembly with Cheesy Parts.
Intake
Task: Test intake prototype with pivotable arm
-
We assembled the intake prototype and mounted it to the 2015 drivebase to test. We were able to run a few tests with a single set of wheels, but unfortunately, as the intake was made out of 0.25" plywood, a part of the arm broke off and we were unable to gather any further data.
Task: Test 2015 Simbotics style intake prototype with pivot wheel sets
-
We initially based the intake prototype off of 2015 Simbotics’; with the first set of wheels pivotable but not the second set–we spaced out the second set to be tangent to the cube when it is 13" width. When intaking a cube in a square position, the intake easily worked, however, when intaking a cube in a diamond position, the cube got trapped between the first set of wheels which were able to pivot to comply to the cube's shape and second set of wheels which were stationary. To fix this, we made the second set also pivotable and were able to intake a cube at different angles. We hooked up the motors on the intake to the drive talons on the development board and were able to simulate different speeds for different sides by turning with the control board joysticks. With different speeds, we were able to force the cube to rotate into a square position in a certain direction which shows that some amount of asymmetry may be necessary to intake cubes. We will continue testing this intake on the field carpet to account for the friction between the cube and field and will further design this in CAD into a stronger prototype.
Programming
Task: RPILIDAR Driver
-
We finished up writing the driver and implementing all necessary methods. The driver is ready to be tested once the LIDAR sensor arrives.
Task: LIDAR Visualizer
-
We continued work on the LIDAR visualizer. We set up a Node JS server that recieves LIDAR point data encoded in JSON from the roboRIO using Network Tables. The server then uses websockets to send this information over to the viewing page. We also continued work on the visualizer interface. It can now plot fake JSON data, but needs to be hooked up the the websocket so it can display a continuous stream of data from the LIDAR sensor.
