
Blog Archive
FRC Day 1 Build Blog
Day 1: Kickoff & Testing
Today was the first day of the FRC build season. The new game, FIRST Steamworks, was revealed, and we began evaluating strategies and testing prototype mechanisms for our 2017 robot.
Helpful Links
The game manual and rules are linked below. All team members should familiarize themselves with the manual, especially the Match, Game and Robot sections.
Game animation:
Prioritization & Strategy
To evaluate potential strategies for our team, we estimated times to perform tasks such as picking up and depositing gears, collecting balls, hitting hoppers, etc. We then compared that time to the point value of each task to determine a priority list of items to prototype as well as to begin match strategy.
For 2 strong robots working together in eliminations, an optimal strategy could be to each perform a 2 gear autonomous and then in teleop do 2 “hybrid cycles” in which they each score both a round of 100 balls and a gear followed by 2 “ball cycles” where they score only balls. This would produce a maximum score (assuming 80% shot accuracy) of 410 points. Perhaps the third robot could play defense rather than contributing offensive points.
More information on this strategic analysis can be found in this spreadsheet.
Prototyping
Today, we started by prototyping various mechanisms to accomplish each of the tasks in the game. Later, we will work to evaluate the prototypes, determine which are most promising, and integrate them together for more comprehensive testing.
Shooters
High Throughput Shooter –
We discussed creating a shooter which can shoot a large number of balls very quickly (goal is 50 in 1 second). This will need to be designed, built, and tested in the coming week.
Single Wheel Vertical Flywheel – back spin –
We made a prototype for the vertical flywheel by modifying the hood of dropshot. We found that the shots often were inconsistent depending on the orientation of the wiffle ball holes.
Testing:
Single Wheel Vertical Flywheel – front spin – We reversed dropshot and tilted it backwards to use the same flywheel but give the balls front spin instead of backspin. The balls still veered and had the same problem as backspin
Testing:
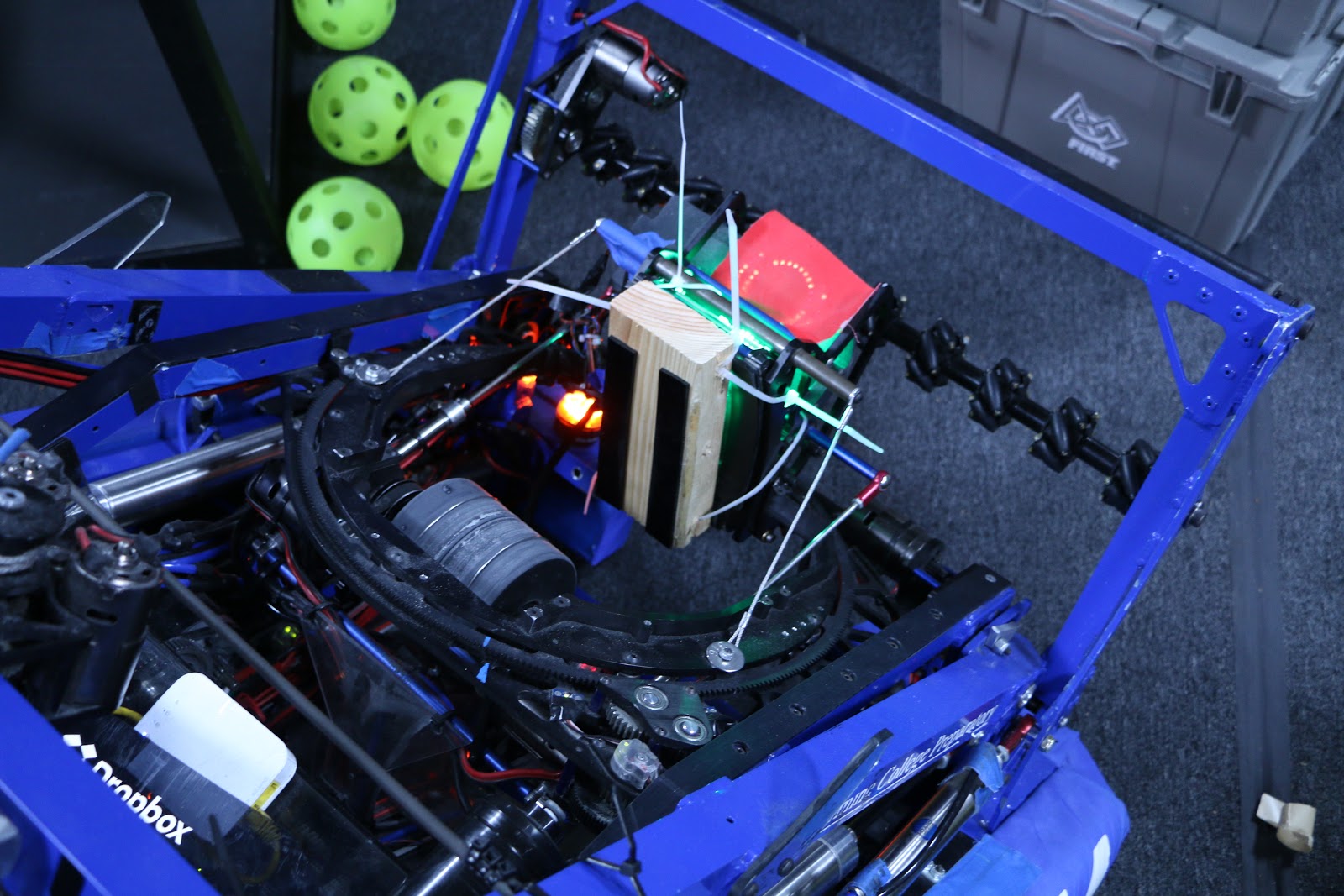
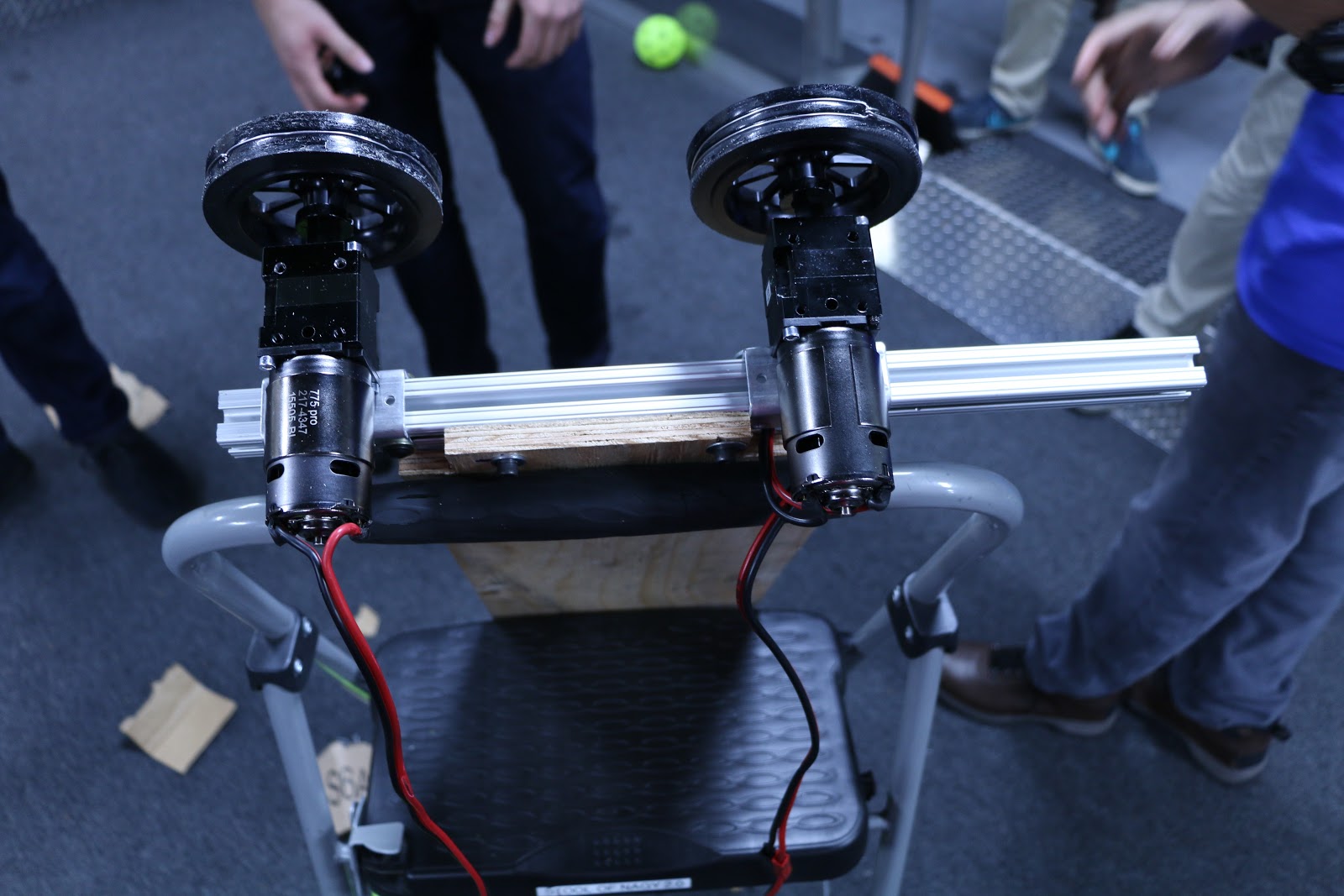
Double Wheel Horizontal Flywheel – This looks like the most promising prototype we have so far. It reduces spin on the ball to minimize the wiffle effect on trajectory. We are going to change this to a vertical double flywheel so that we can lengthen the wheel and shoot multiple balls side by side.
Testing:

Ball Intake – The preliminary plan is to have the bumper not at the limit of the maximum size so that we have room to deploy an intake in front of the robot (past the bumper, but within the maximum size). Although we could have a bumper gap, the maximum gap is about 14” and this setup would allow us to intake the full width of the robot which could be much faster and easier. It has been modeled in CAD and laser cut, but we have yet to assemble the prototype.
Catapult – A prototype was started for a spring-powered catapult shooter. This prototype needs some additional work to determine feasibility.
Gear Manipulation Mechanisms
Hook – We prototyped a one-way latch that is latches into one of the holes in the gear and then is pulled back into the robot to hold the gear with friction. This could then be actuated to tilt up and down to move from a floor-loading position to a hanging position. We made a new version with two hooks to allow for more misalignment when picking up the gears on the field.
Claw – A second prototype was built with two motorized wheels which intake the gear off the ground. The wheels are mounted to sprung arms which open around the gear as it moves in. It seems to work, but the quick prototype has the wheels spinning too quickly. We are going to work on slowing it down.
Drivebase – We have tentatively ruled out any sort of strafing drivebase because we don’t think it will be necessary. We will most likely use a 6-wheel or 4-wheel drive robot, as the team has high familiarity with these designs and should be able to construct them effectively and quickly. We are currently working on evaluating the best wheel configuration to have the ideal maneuverability by adapting Deadlift’s (2015 robot) drivebase with different wheels. We ran into some minor issues with radio connectivity, but we plan to fix this by using a newer radio. We need to finish the prototype.

Rope Climbing
Comb prototype – We discussed using a custom rope for hanging, likely a narrow, strong rope (like paracord) with knots. This prototype uses a comb-like hook to grab the knots and reel in the rope to pull up the robot and hang. We have tested it passively, but have yet to determine if it can support a robot’s weight.. There is still lots of work to be done, especially in optimizing the shape of the comb / spool so that the radius does not change too much as it rotates (necessary for gearing optimization).
Testing:
Programming
We started programming this season by creating a private code repository on Github based off what we did last year. We then started working on our demo boards, imaging them with the new 2017 firmware and installing driver station software to them. We also began experimenting with a Pixy camera for vision tracking. It seemed promising and easy to configure, but it didn't communicate easily with the roboRIO so more work is needed.
2015 Central Valley Regional
This weekend, from Thursday to Sunday, Team 254’s FRC team competed in the Central Valley Regional FRC Tournament held at Madera South High School. Our team had an extremely strong showing, seeding second place in the qualifiers and taking home first place along with Team 1678: Citrus Circuits and Team 1323: Madtown Robotics. Throughout the tournament, our robot, Deadlift, consistently pulled off the three tote autonomous and stacked up six totes with a recycling bin and litter, scoring 42 points per full stack! We were also presented the Quality Award based on our robot’s overall robustness and quality of design. Overall, this weekend was very successful for our FRC team and we would like to commend every team that participated in CVR this weekend.




Bay Area Science Festival
At the Bay Area Science Festival we got the opportunity to speak with many teams in the area about their robots; these teams included Team 1868, Team 604, and many more. We also talked to developers and engineers around the bay area representing their organizations and companies. The representatives of the Berkeley high school robotics competition (Pioneers in Engineering) were present, and we were able to discuss how to reach out to high schools with smaller STEM programs using competitive robotics. In addition to the robotics booths around our demo area, there were over 100 different stands and booths on the ground floor of the stadium, each bringing STEM to the public in a different and interesting way.

One booth allowed people to separate the DNA from a strawberry plant using alcohol and detergent. Another stand presented a demo for the MIT app maker (//appinventor.mit.edu/explore/front.html) and the presenter created a text to speech android application in front of us in less than 5 minutes! Not only were there copious booths, but amiable and experienced engineers and scientists were everywhere and ready to discuss their field of research. By the fire pits, environmental scientists discussed the future of agriculture. By the portable planetarium, an astronomy professor discussed the reason for Pluto not being a planet with an interested and engaged audience.

At our booth, interested fans asked us about FIRST and how it is organized, as well as the build of our robot and its specs. Children and adults alike had fun driving Barrage using our two joysticks and were guided by our driver, Christian. Even beyond our booth, FRC alumni (including one very kind and complimentary college student who was presenting for the Berkeley Science Review) recognized our team and started conversations about this year’s robot, Barrage, and some of our past robots and competitions.

All in all this was a great opportunity for our team to talk to STEM supporters all over the area. We had a lot of interesting and inspiring discussions with many of the people here, and look forward to next year’s Bay Area Science Festival!
DVHS VEX Tournament 2014
Competing and Improving
The Dougherty Valley High School (DVHS) in San Ramon hosted this tournament. The team was pleased to see upon arriving that competition boards were placed in the pit area, and that the location of the pit allowed for very quick switching between matches. Unfortunately none of our sub teams managed to qualify for States, but this competition allowed our robots to be tested for the first time and we used this feedback to repair and upgrade our bots. For example Team 254F lost two matches in qualifications and two in eliminations. The members of Team 254F are now working on improving their intake and looking forward to the next VEX tournament.
 Team 254G with glorious sub leader Vidur communicating with his sub team
Team 254G with glorious sub leader Vidur communicating with his sub teamOne VEXing Tournament
Thankfully there were no MAJOR technical issues (robots catching fire, exploding, becoming sentient) and all of our teams learned a lot in the competitive process. The tournament was a success! We would like to recognize teams 21D for their excellent design for the high rises, and also 6089, 5776C, 5327A, and many other teams in attendance for challenging us and helping our sub teams to improve their bots. Lastly, many thanks to DVHS for their tasty and very reasonably priced snacks; oh and also for hosting this fun and competitive tournament. And to the VEX teams at the competition, all of us are looking forward to seeing many of you at the Bellarmine VEX tournament this November!
 Team 254D Driver about to shake hands with some fellow VEX enthusiasts
Team 254D Driver about to shake hands with some fellow VEX enthusiasts Team 254B watching their bot intently as Tom takes a sly selfie
Team 254B watching their bot intently as Tom takes a sly selfieStay Cheesy
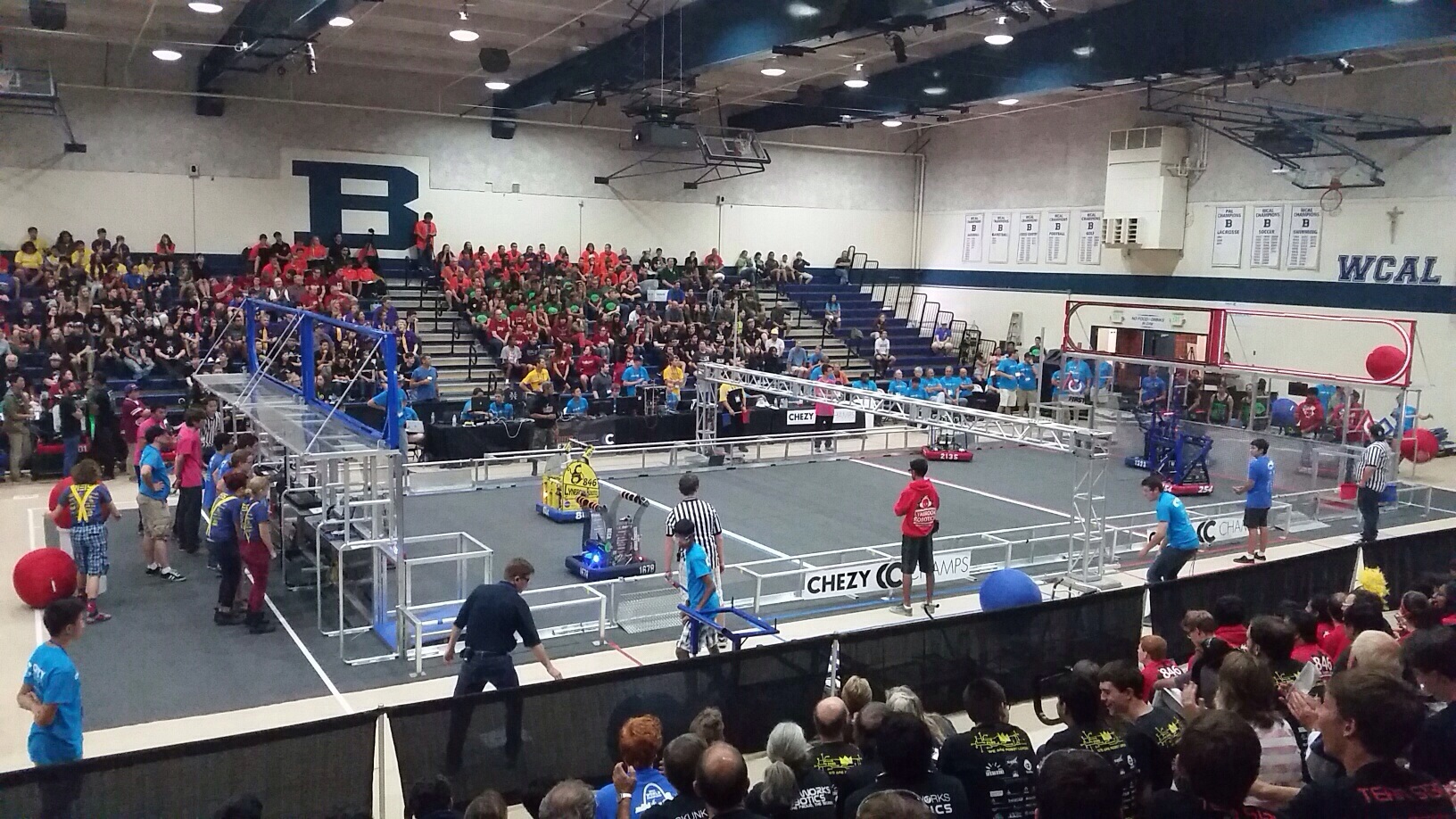
Chezy Champs: Behind the Scenes
Today teams from across the country gathered to compete in Team 254’s Chezy Champs Aerial Assist competition. After Friday’s hard work setting up the field and teams moving setting up their pits and robots, we’re ready to start a day of competition!

Pre competition hustle
I love the smell of robots in the morning. Starting at 8am this morning, teams were allowed into the pits to start modifying and preparing their robots, and teams entered the Bellarmine gymnasium to stake out spots in the bleachers. And about half an hour later Shockwave was released and tested in the field.
Shockwave showing off for the crowd
At 9:30 the opening ceremonies began, introducing our emcee and game announcer, Karthik Kanagasabapathy and Paul Copioli.
Pre game pump up
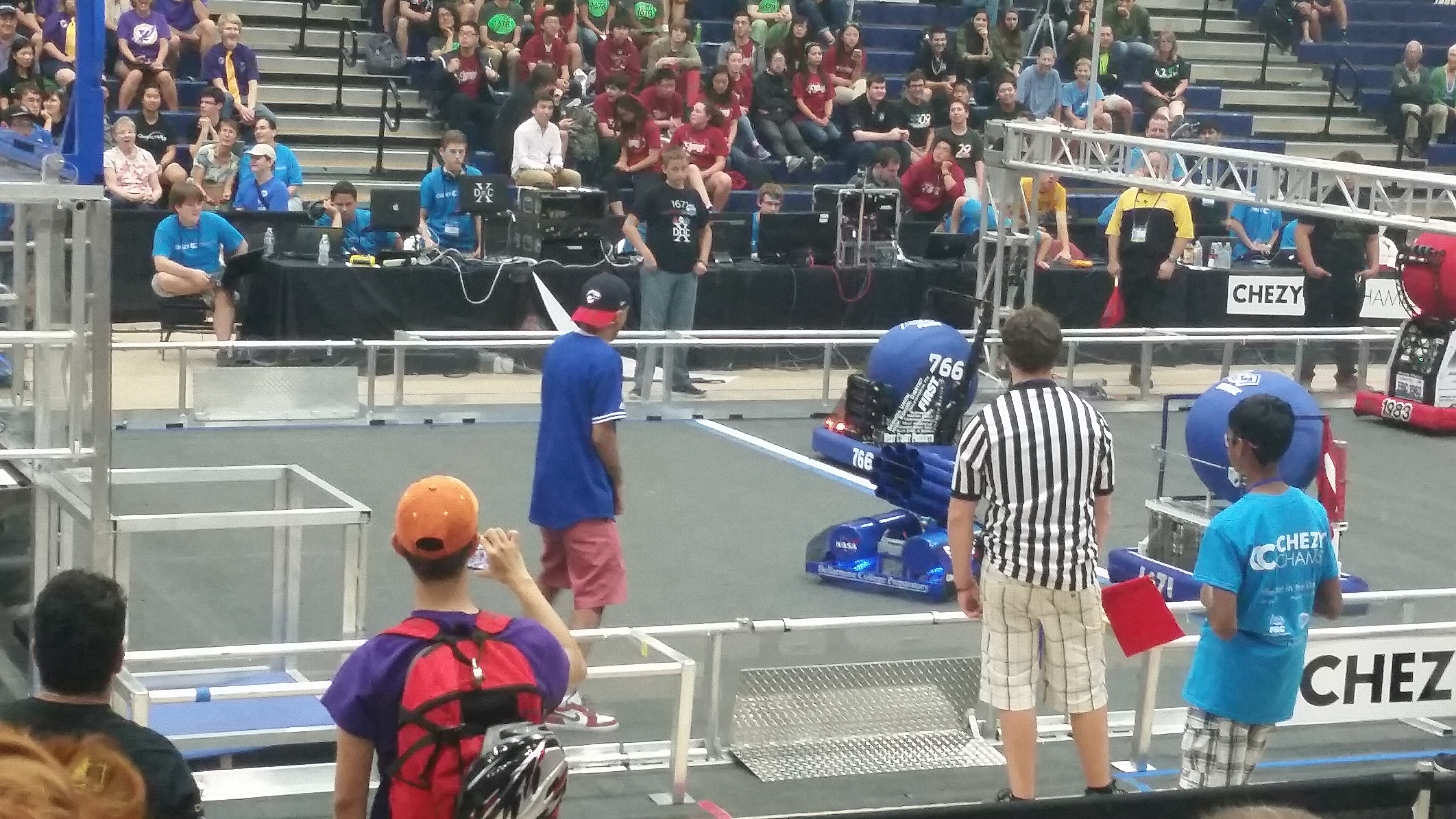
After all teams had staked out seats in the bleachers and the competing robots were in their ready position, at 10am the first match started!
First match autonomous mode begins
After match 3 Shockwave decided to come out onto the field to compete with Karthick
SHOCKWAVE ON THE LOOSE!
After the first match I decided to take a walk around the facilities. Right behind the arena was the CC swag shop, where t-shirts, sunglasses and other swag were sold.

Two 254 moms manning the swag stand
I became aware that other items such as snap backs, volunteer shirts, and even life sized EJ faces (for the true EJ fans) were available through preorder.

Team 254 member, Michael Ramstad, showing his pride with a life-sized EJ face
Next to the swag shop were the official Chezy Champs trophies, including the widely coveted golden corn dog for display of GP throughout the tournament.

The glorious golden corn dog and other trophies
Lastly I headed out to the pit area in Liccardo to check out some of the other teams. At the admin desk, manned by 254’s glorious president Andrew Torrance, I checked in as a CC volunteer and put my super safety glasses on.

Staff surrounding our glorious student leader, Andrew Torrance
The first team I encountered in the pits was the Buchanan Bird Brains, Team 1671. A few members were willing to answer my questions about the tournament and their team:
Q: Where is your team based?
A: Our team is based in Clovis, California. It’s like the little brother of Fresno.
Q: What is the name of your robot?
A: The name of our robot is “Doc 10” because Doc Buchanan is the founder of our team’s high school and 10 because it’s team 1671’s tenth year competing.
Q: What does FRC mean to you?
A: FRC is like the family you never knew you had, and once you’re in the FRC family you never want to leave.
Q: What do you think of the Bellarmine campus?
A: The architecture is beautiful, it honestly looks like a college campus.
After interviewing the Bird Brains, I decided to talk to some of the teams at the other end of the pit. After a few minutes, I found that the Team 4201 pit was open for visitors!
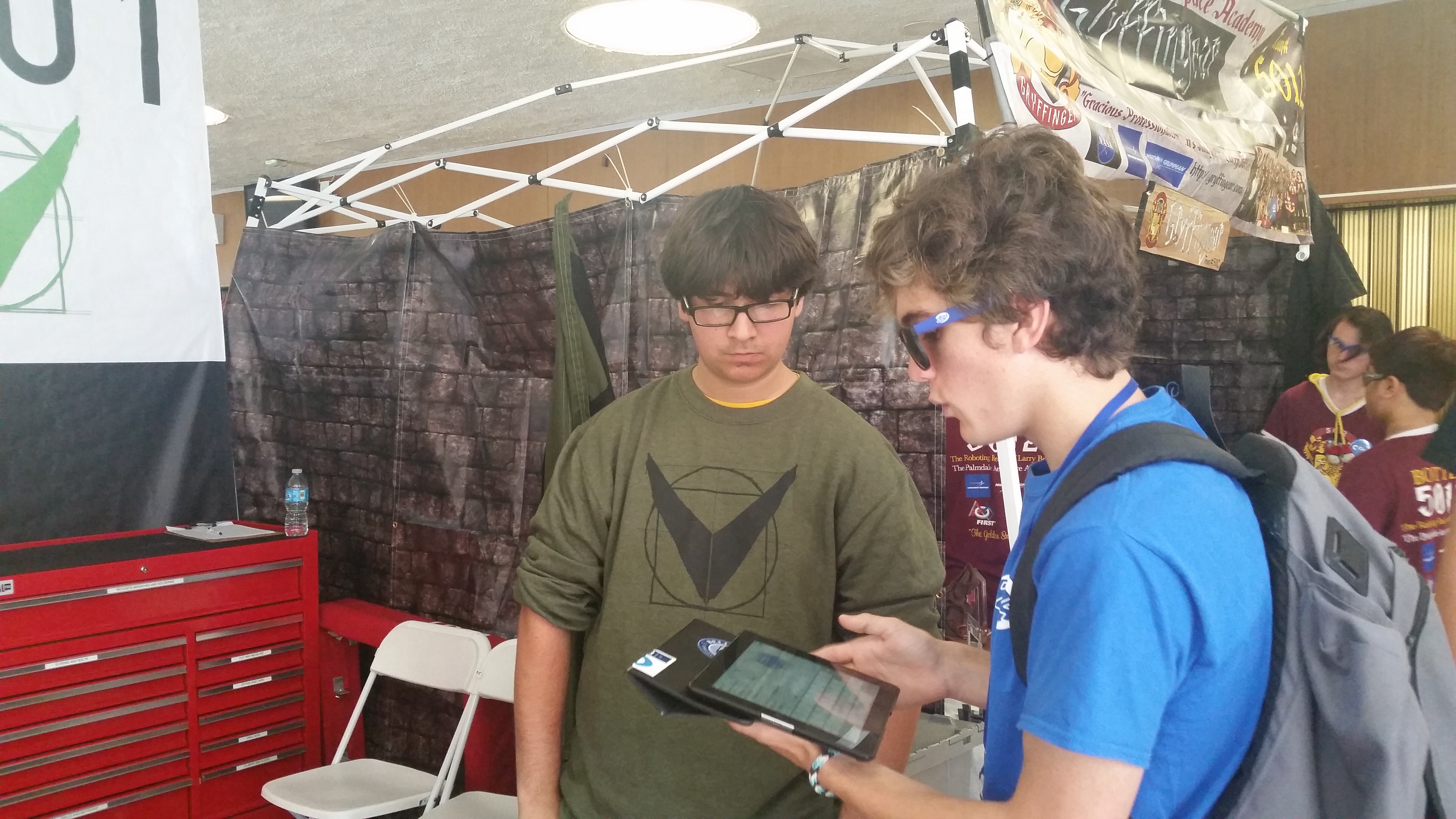
Me (in the blue shirt) taking notes on my interview with a member of team 4201
Q: Where is your team based?
A: Our team is based in Hawthorne, California near L.A.
Q: What is the name of your robot?
A: The name if our robot is #straightflexin. The # is part of the name, too! And it can’t be spelled out.
Q: What does FRC mean to you?
A: Since our school doesn’t really have any sports teams, this is our school sport. Like I used to play hockey but there was no hockey team. And, FRC is like the engineering version of a varsity sport. So for me it became a substitute for playing on a team in high school. Really it’s just the best thing ever.
Q: What do you think of the campus?
A: The campus is awesome, we really love your copper pipes. The water is so clean!
Next interview was with Team 696, the Circuit Breakers:
Q: Where is your team based?
A: Our team is based in La Crescenta in L.A. county, a little bit north of L.A.
Q: What is the name of your robot?
A: The name of our robot is Snapdragon. We actually have two robots, the one we use to compete is named Snapdragon and the practice bot we call “Snapdragon upside-down.”
Q: What does FRC mean to you?
A: FRC is one big family, once you’re in it helps you to stay connected with people who share your interests.
Q: What do you think of the Bellarmine campus?
Oh this is a high school? I seriously thought we were at a college. Wow, it’s really big.
After interviewing Team 399 I decided to visit the local food trucks for lunch. Outside we had the food trucks “sticks” and “scoops,” and inside food vendors sold everything from muffins to pizza.

Jared must be so proud
After a short food break/nap in the field, I went back to the arena to make sure everything was ok. Everything was going very smoothly, and all the teams seemed to be enjoying themselves. None of our equipment was blowing up, there were no electrical fires, and none of the gaming servers crashed. I’d say that’s a success!
I had a lot of fun meeting and talking to all the different teams, and hope that the guest teams had just as much fun competing in and watching the matches as we did. Thank you to all the teams who showed up, and those who supported us by watching the event live on Twitch.
Go Poofs!
