
2013 FRC Build Season Blog
Pre-STL Day 2: Cleanup and Buckets
Cleanup
Students started today’s build session with a general clean up after dinner, including a full cleanup of the upstairs area and a more specific unpacking.
Buckets
After the cleanup, investigation on the buckets continued, and it was learned that if a bar applies pressure on the bucket in the part nearest to the conveyor, a system is created which prevents upside down frisbees from joining the stack. However, this only works if the first disc is intaked right side up. Furthermore, work was done on a system which gets discs from the human player.
Programming
The programmers worked on a couple of classes which allow for certain buttons to take effect, even when the robot is disabled. These buttons include ones which reset the gyros in the robot and select autonomous code. In addition, there were minor refactorizations of the code.
Pre-STL Day 3: Final Cleanup and Bucket Design Incorporation
Cleanup/Unpacking
Students finally finished unpacking from SVR. All of the competition crates were unpacked and bins were restored to their original places. The lab is now fully equipped and ready for robot iterations and improvements.
Buckets

A modified design with the green cylinder representing the bucket.
The bucket design was worked on today in great detail. Parts from the indexer, shooter, and conveyor were changed in CAD today. The conveyor side plates were shortened to reduce weight and accomodate the large bucket. The indexer side plates(butcher knives) were made longer to account for the buckets new position in the robot. Finally changes were made to the shooter parts to accomodate the width of the buckets and frisbees that currently fit from wall to wall of the insides of the hanger. These design changes are still being considered and evaluated.
Programming
Brogrammers know what was done.
Pre-STL Day 4: Engineering Priorities for Time Constraints
Intake
Students worked to carefully repair the intake when it broke this morning. They had to pause momentarily to remove the intake and fix it on the side.

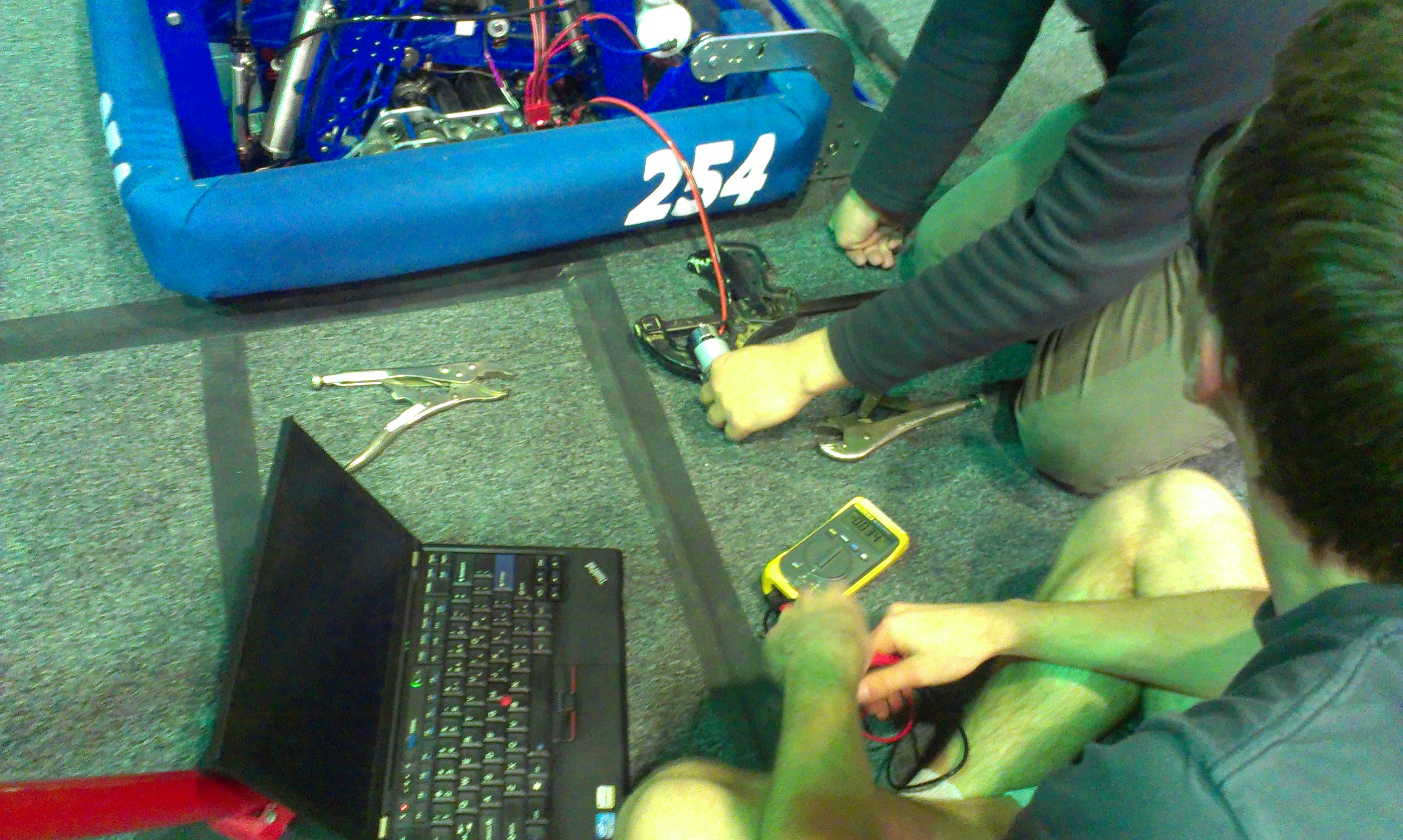
Fixing the Intake

Jonathan Lee debugging the robot
Design
Due to the fact that there are only two weeks remaining before World Championships in St. Louis, a lot of the team’s new redesign ideas needed to be reconsidered realistically. While the progress of designing a bucket indexer seemed promising for spectacular scoring, it needed to be put on hold so that the team could focus on other important design tasks. In addition, it would require a major redesign or would bring up weight issues easily. The team decided to refine and work out the issues it currently has. The benefits of the major redesigns are not worth their risks, and it will be a much better use of time to work out the small issues the robot currently has.
Currently, the team is using Solidworks to design a new intake gearbox that would not make the motor burn out as quickly as the Banebot motor does now. In addition, the new gearbox will eliminate a VEX planetary from the robot.
Testing the intake Banebot motor
Another important task includes making indexer hard-stop mechanism to prevent frisbees from jamming and stacking inside the indexer. This addition is a major improvement that is a top priority. This hard stop needs to be simple, passive, and reliable. Most likely, the stop will be mounded to the conveyor side plates. The stop itself will be lowered as the indexer mechanism is lowered. As the indexer is raised, so will the hard stop to forbid the frisbee from moving forward.
Driver Practice
Abhi Kumar and Jonathan Lee practiced driving the robot around to improve positioning consistently and prepare for competition scenarios.

Abeek and JLee driving abhsentmindedlee
Pre-STL Day 5: Shopping Spree & Dieting
CAD
Today, students and mentors worked together to design new subsystems of the robot. For instance, a new gearbox was designed for the intake lowering and raising, which would replace the current VEX planetary gearbox. The VEX planetary was very inefficient and quite heavy. The new gearbox with its motor will be marginally heavier than the previous setup, and it has the benefit of a more favorable gear reduction. After the design work was completed and verified, the team went online to sites like AndyMark and McMaster to order these new necessary parts. It is essential that these parts are ordered and arrive quickly, as time is running out before World Championships.
Dieting
The team is scrambling to find places to trim weight on the robot. The new shooter wheels and intake gearbox are adding some weight to the robot, so the team trimmed some fat by removing the side panels, removing the pressure gauge support plate, and other areas. The 1/16″ side panels will eventually be replaced by side panels made of 1/32″ polycarb. Together, all the weight reductions will put us under weight. Although we are cutting it very close, we will eventually get to where we want to be.
Programming and Sensors
The programmers experimented with VEX bumper sensors as a means of detecting whether or not the frisbee is fully loaded in the indexer, and thus ready to transfer up to the shooter. They attached two bumper sensors via double stick tape on either side of the hard-stop plate. The next step of this is to wire the sensors to the digital sidecar and write up some codes. When completed, the bump sensors will allow for increased speed of rapid fire. Tests will determine the reliability and durability of this setup to ensure it can survive the stresses of competition.
Pre-STL Day 6: Packing
 Today, students built a pallet to ship large items to St. Louis. They packed some very crucial items needed for Championship, including the robot cart, pit shelving, batteries, and lights for the trussing.
Today, students built a pallet to ship large items to St. Louis. They packed some very crucial items needed for Championship, including the robot cart, pit shelving, batteries, and lights for the trussing.
Lastly, programmers debugged some issues with the pit lights. The color effects no longer spawn new processes and overlap each other. Although pit lights are not a priority at the moment, students are making strong effort to make these functional to give the best appearance at the Championship event.
Pre-STL Day 7: Maintenance & Anticipation
Intake
Wooden blocks were added tonight to the practice robot to keep the polycarbonate base of the intake from touching the ground. This is one of a series of adjustments to the intake to make it more efficient, fluid, and functional. The polycarbonate base often gets caught in the carbonate causing jams and reduced mobility.
Shooter/Indexer
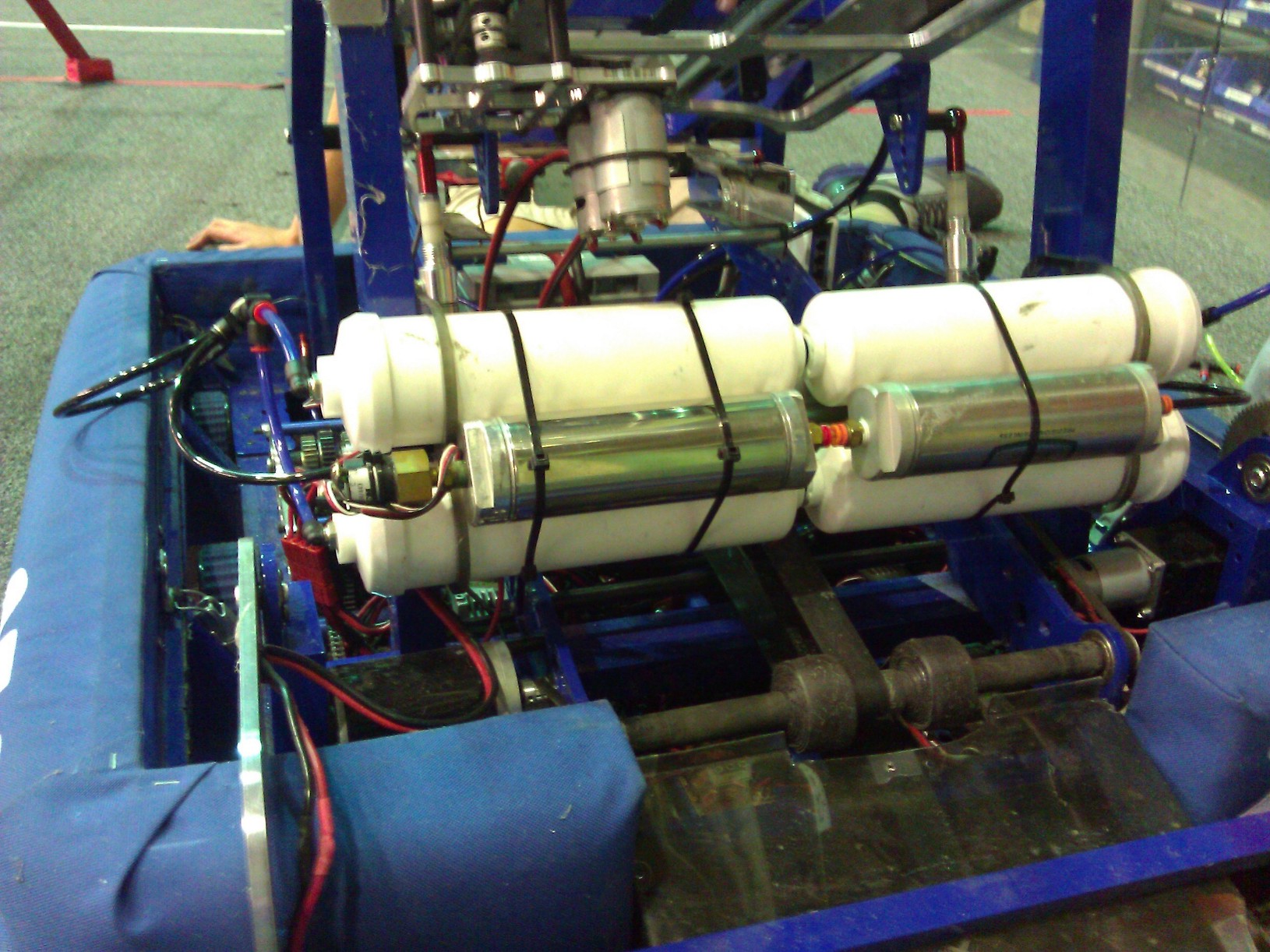
Overkill with all of the tanks.
Even though the Frisbee hard stop was working last night, it was not today with the pin having trouble sliding the stopping plate up and down. This was solved by changing the hard stop to delrin and maintaining the mounting plates to aluminum. Also, students and mentors created two cross bars for the indexer. They also worked on shooter wheel mounting plates. Lastly, the team added temporary air tanks to the practice robot to allow for more shooting cycles and less refilling.
Drivers
Abhi and Jonathan Lee continued driver practice in preparation for the upcoming competition.
Sensors & Programming
Students and mentors tested hall effect sensors using Slipstream as a power source, because of drivers using Overkill to practice. The hall effect sensors would detect the presence of a magnetic field. When magnets are placed on the indexer mechanism, a feedback mechanism is created to determine whether or not the indexer mechanism is completely engaged in the correct position. On the programming side, programmers fine tuned various code for indexing and shooting.
Pre-STL Day 8: Rolling with It
Shooter/Indexer
Students and mentors worked diligently to replace one of the intake rollers with a BBD. Students also worked to troubleshoot an issue with the new intake hardstop that was causing hang-ups on the intake system.
Manufacturing
Working diligently to manufacture new intake gearbox plates to save weight, students cut stock metal to be milled in the CNC.
Pre-STL Day 9: Step into High Gear
Manufacturing
Students started organizing new parts into their respective bins. Most of these parts will be spares for competition. In addition, a few mentors and students worked on deburring, polishing, and touching up parts which will be sent in for powder coating and anodizing.
Drivetrain
Students contine to fix the drivetrain. A dog gear broke yet again. Students worked on taking apart the drivetrain gearbox to replace it.
Intake
Students made new parts for the intake, including new mount side plates. Additionally, students began assembling the intake support gearbox.
Shooter
Students designed a one way valve in the shooter. This stop, made from a simple piece of bent polycarbonate, will allow the frisbee to leave the shooter in only one direction and prevent it from falling backwards. This stop is a simple mechanism to further eliminate possible jams that have plagued the robot for the better part of the season.
Other
Teams 973 and 846 stopped by to the lab for practing and tuning in preparation for the World Championship next week.
