
2014 FRC Build Season Blog
Day 22: Trussing and Wiring
Trussing
Several students worked on building the trussing for the field. They started with 1.5 x 1.5 inch wood struts and spent all day constructing the various portions of the truss. They are on track to complete the main trussing framework tomorrow.
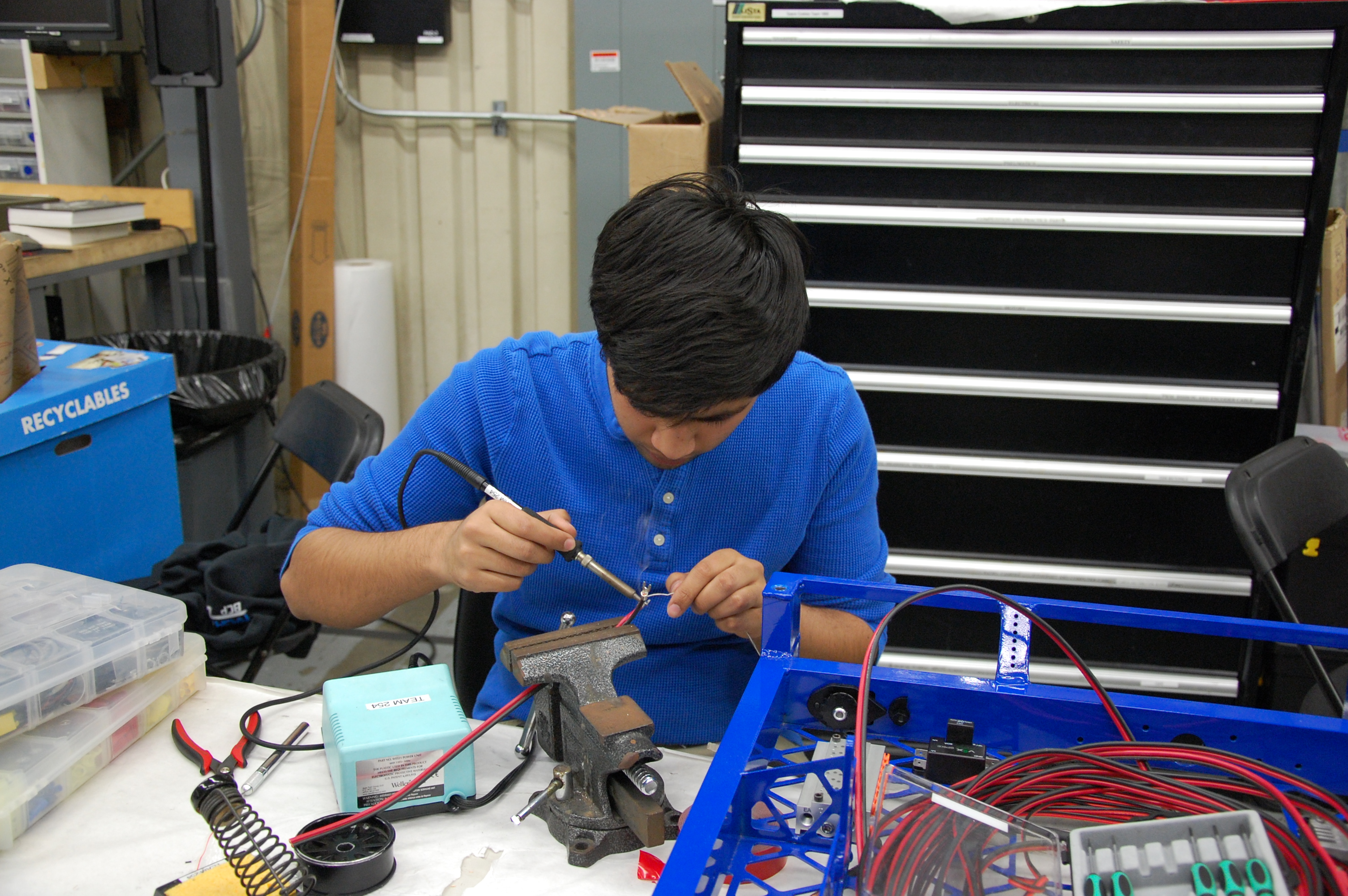
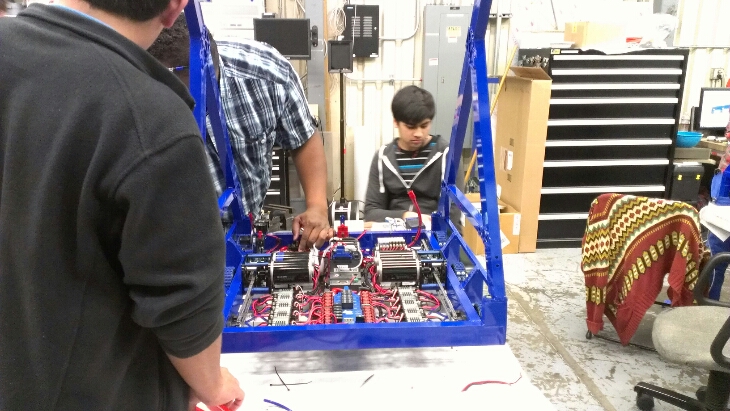
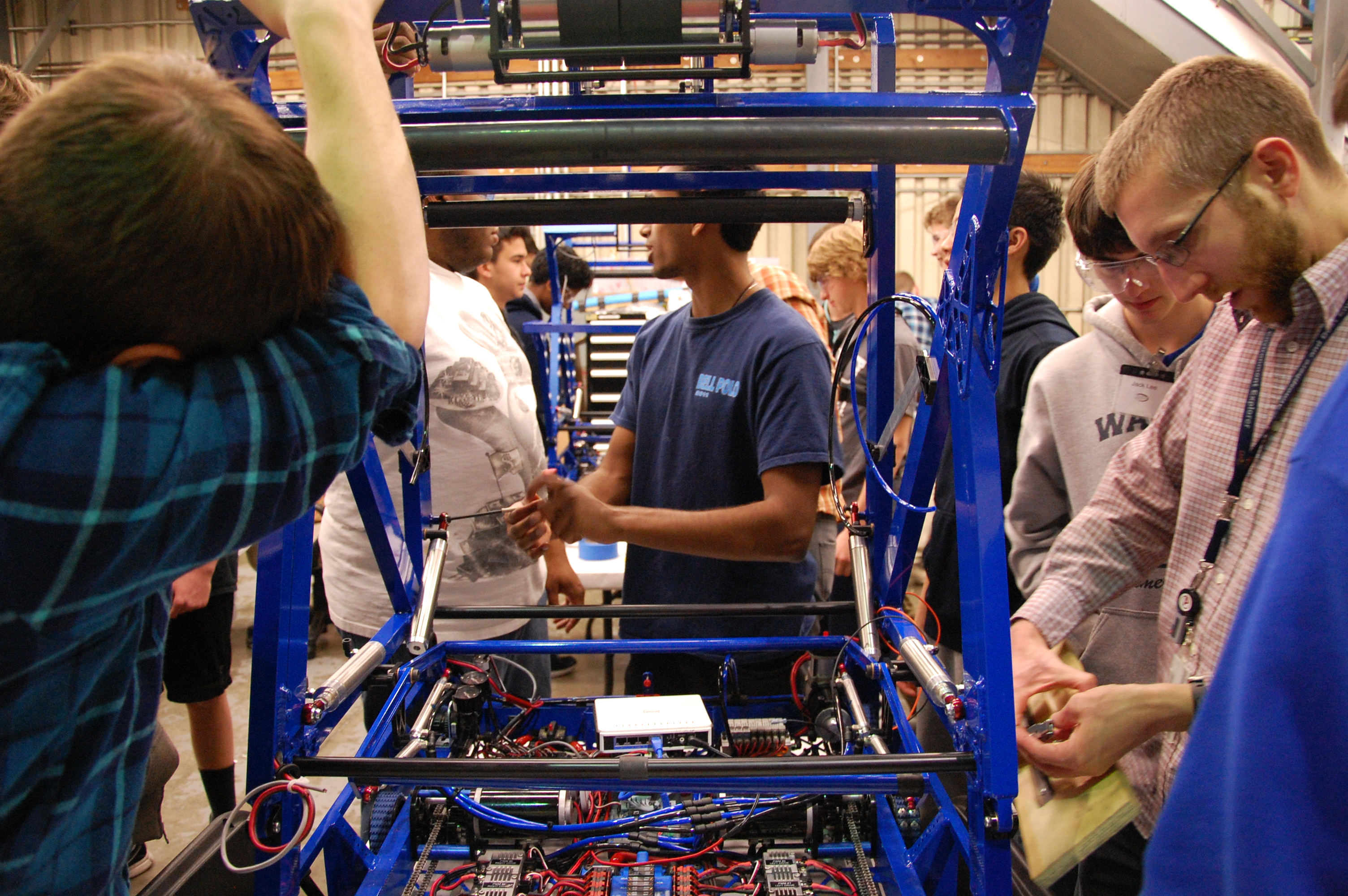
Wiring
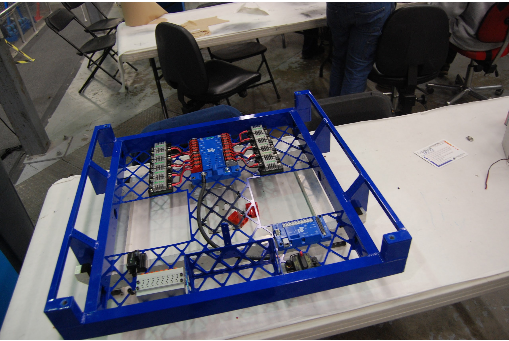
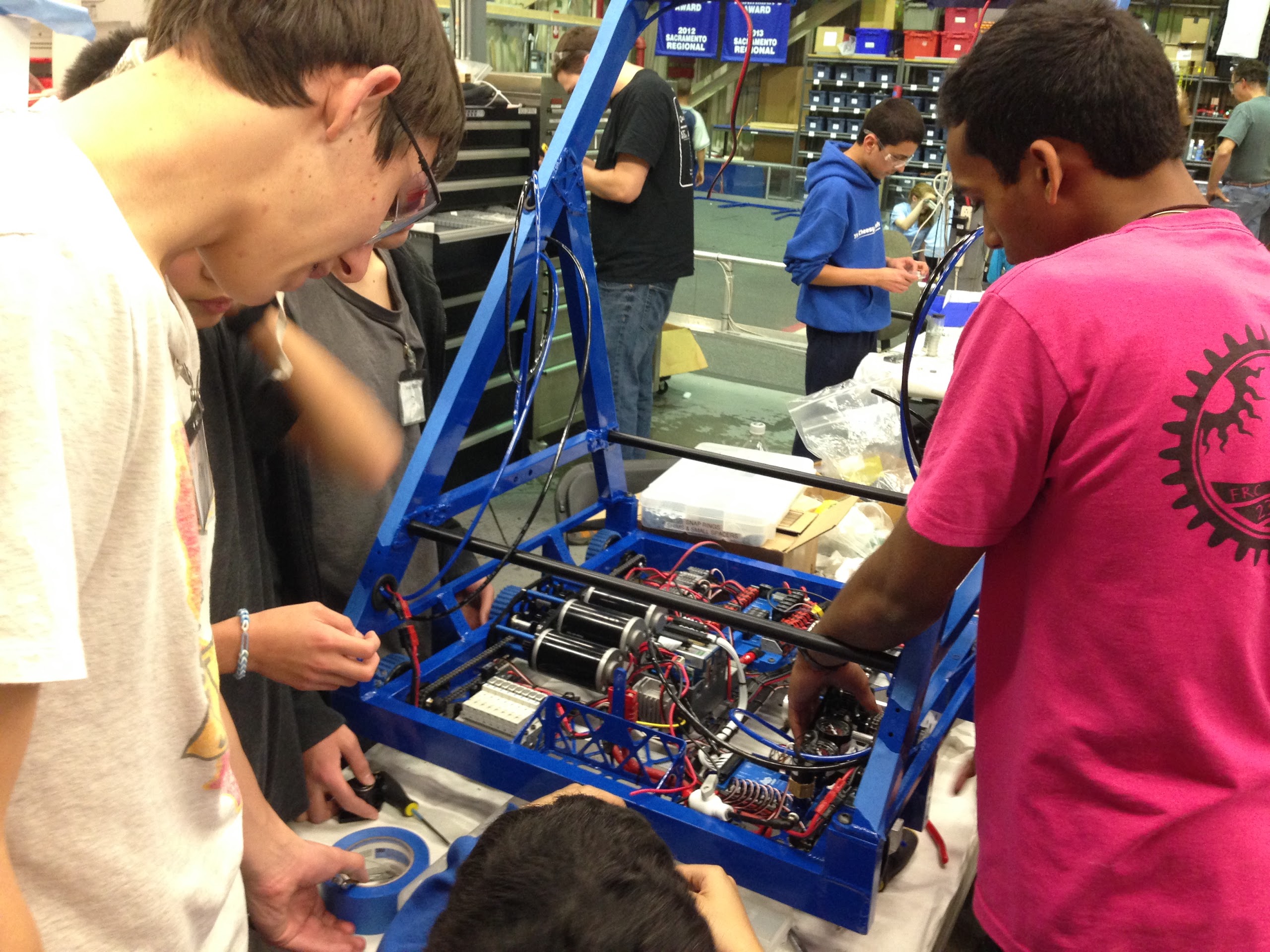
A couple of students began working on wiring the robot. Specifically they worked on wiring the Talon speed controllers to the Power Distribution Board \(PDB\). They cut, crimped and soldered wires and have completed most of the wiring for the speed controllers
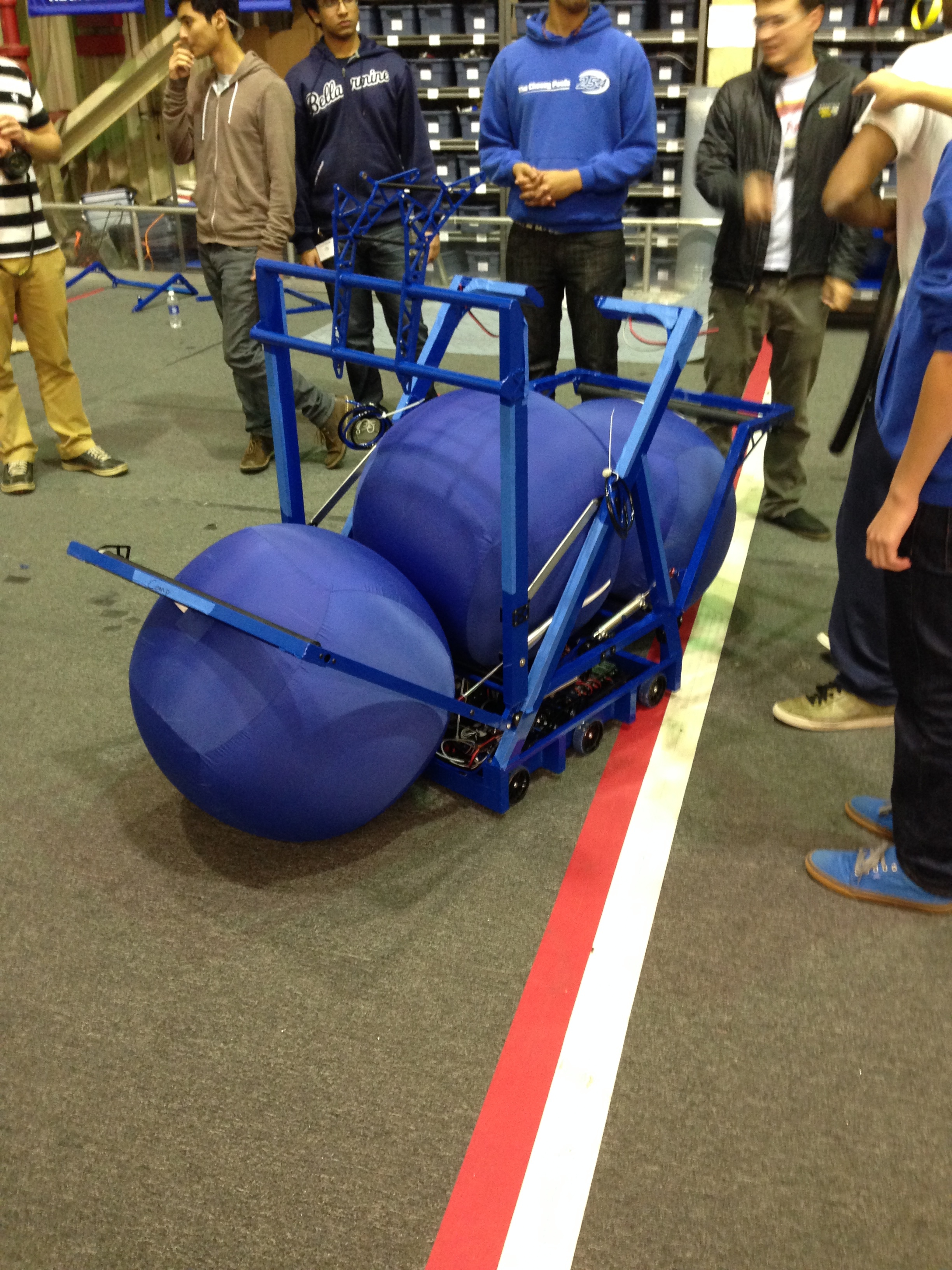
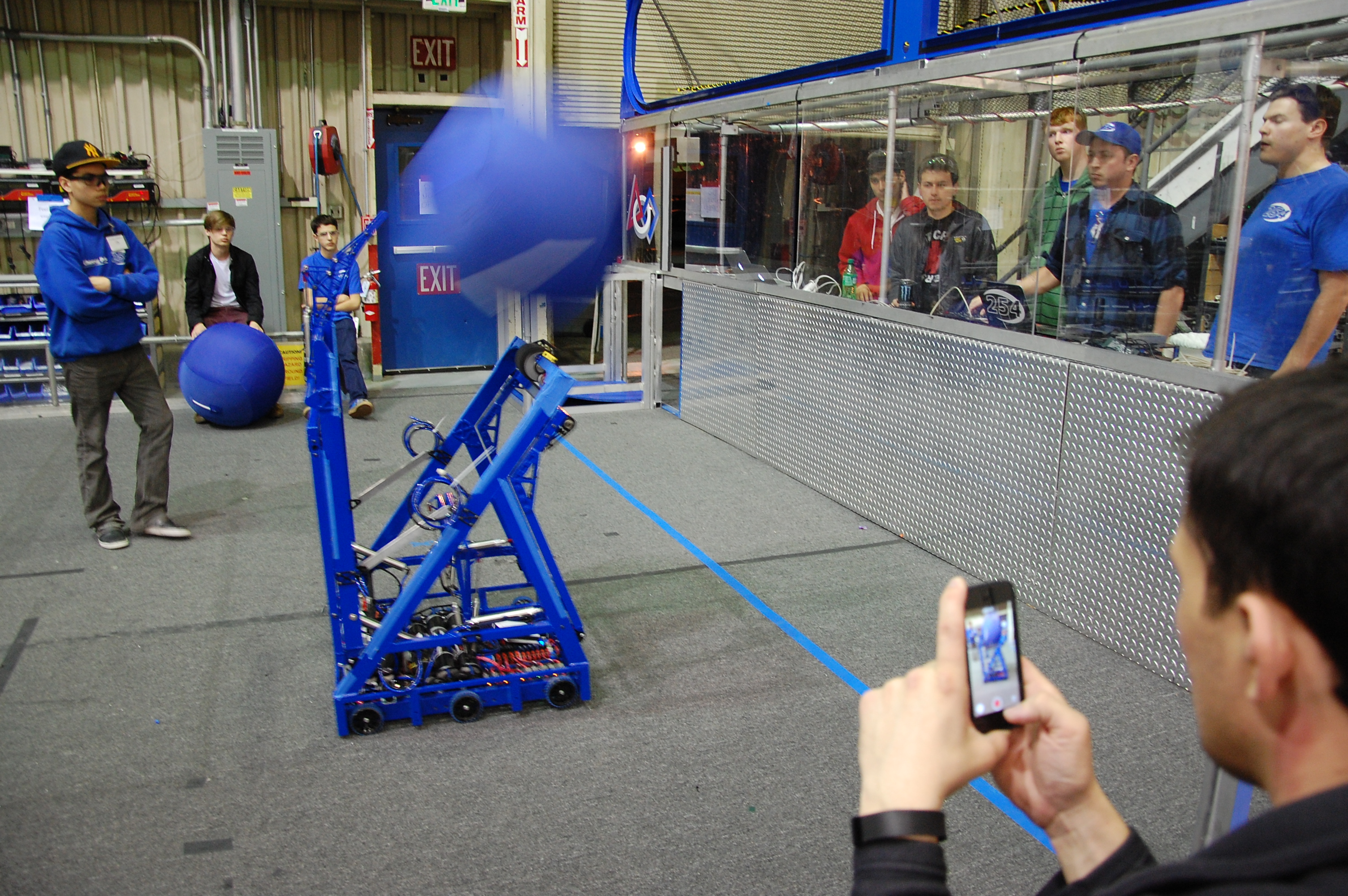
Clapper Popper
The “Clapper Popper” is the prototype indexer for the ball. It uses a scissor lift mechanism to push the ball up into the flywheel in order to shoot. Students retrofitted the old popper with four pistons instead of two. This helped improve the stability by evenly distributing the force of the pistons across each side. This led to less skew when the pistons were fully extended.
Brogramming
The brogrammers worked on the following:
- Getting the drive controller to turn arcs
- Add heading and scaling to the trajectory
- Fix the distance controller
- Fixing bugs and cleaning up the Drive Controller
- Adding the Hold Position Controller
- Finalizing the Data Logger
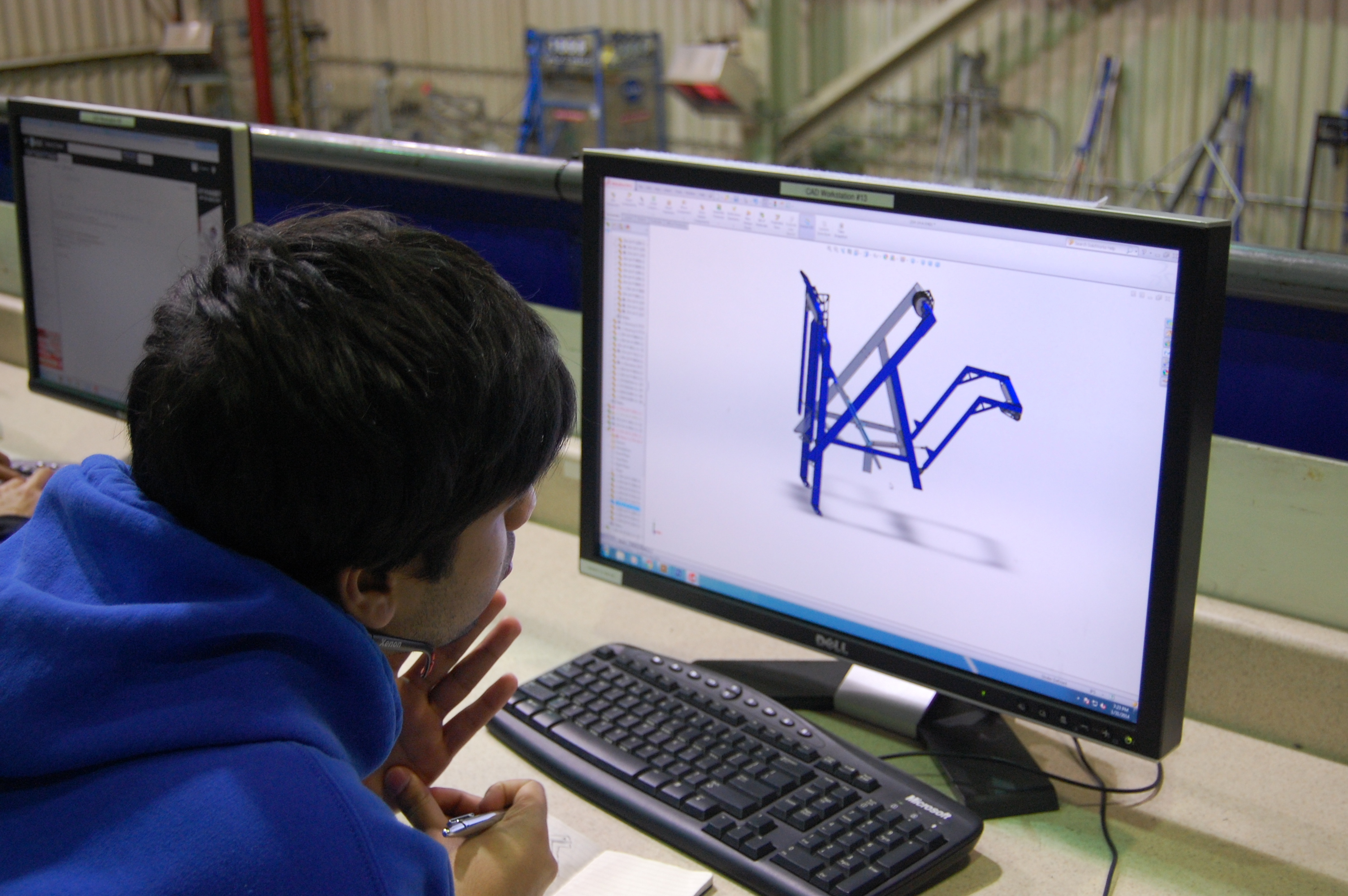
Design
We are continuing detailed design on the robot. For example, today we worked to finalizing the superstructure in addition to working on the front intake. We created part drawings for the front intake so machining can begin on these parts. Furthermore, we worked on cleaning up the rough edges of the CAD model and inserting details such as holes and other parts.
Graphic Design
The Media team worked on designing new t shirts, hats, sweatshirts, phone cases, and sunglasses for this next year.
Students came up with 3 early drafts incorporating the elements of Aerial Assist into the design elements. The phone case design is completed and students are continuing work on both the t shirt and the sweatshirt tomorrow
Day 23: Manufacturing, Ordering, Goal Construction, Lab stuff, CAD
By Clay Rosenthal
Manufacturing:
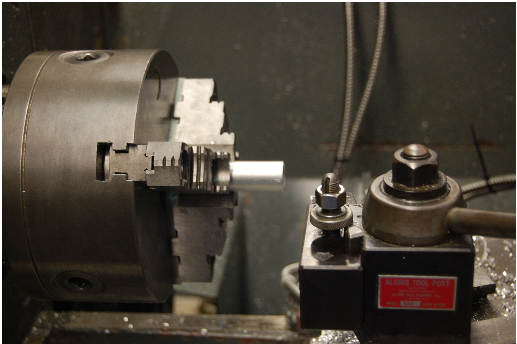
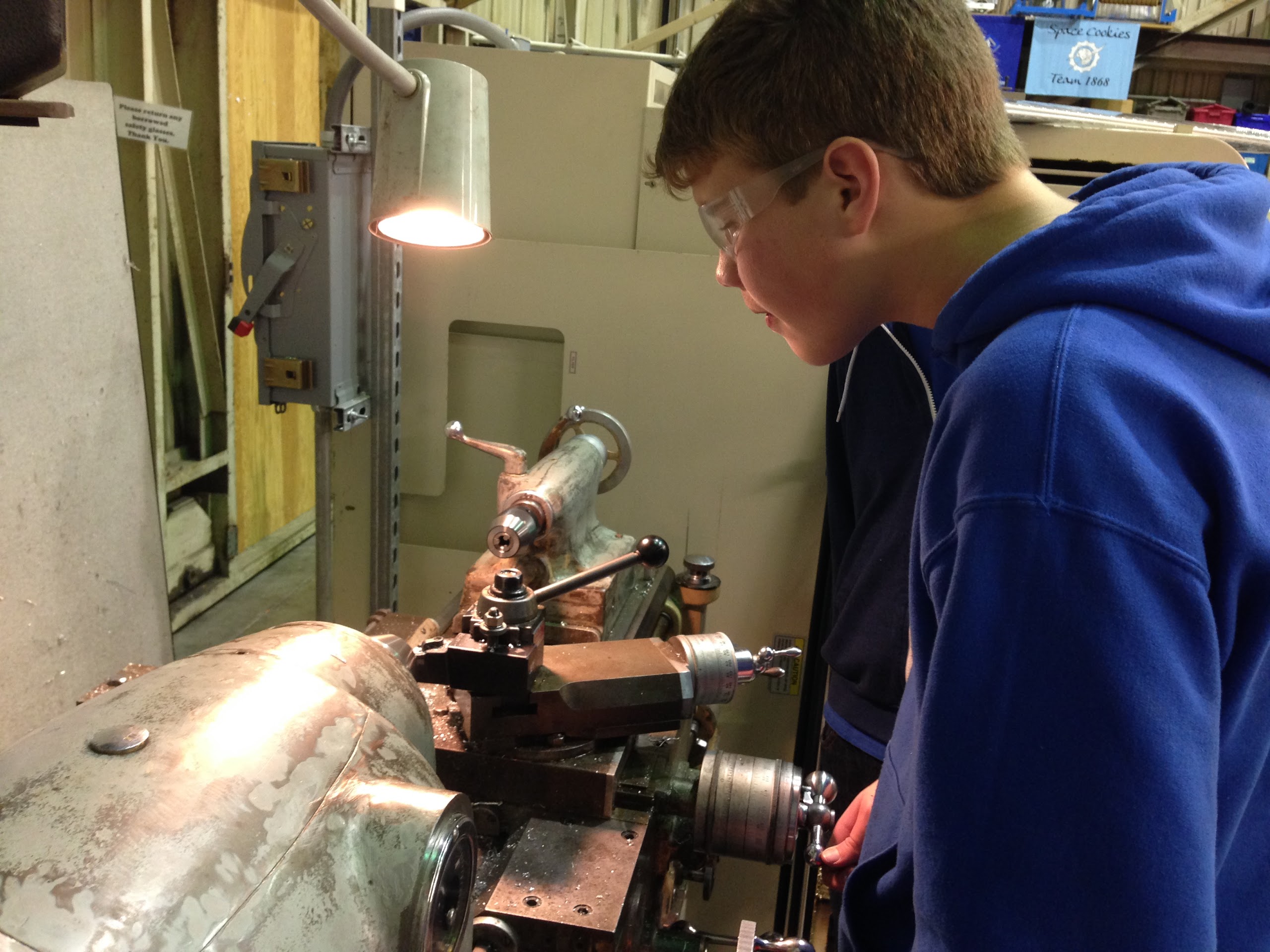
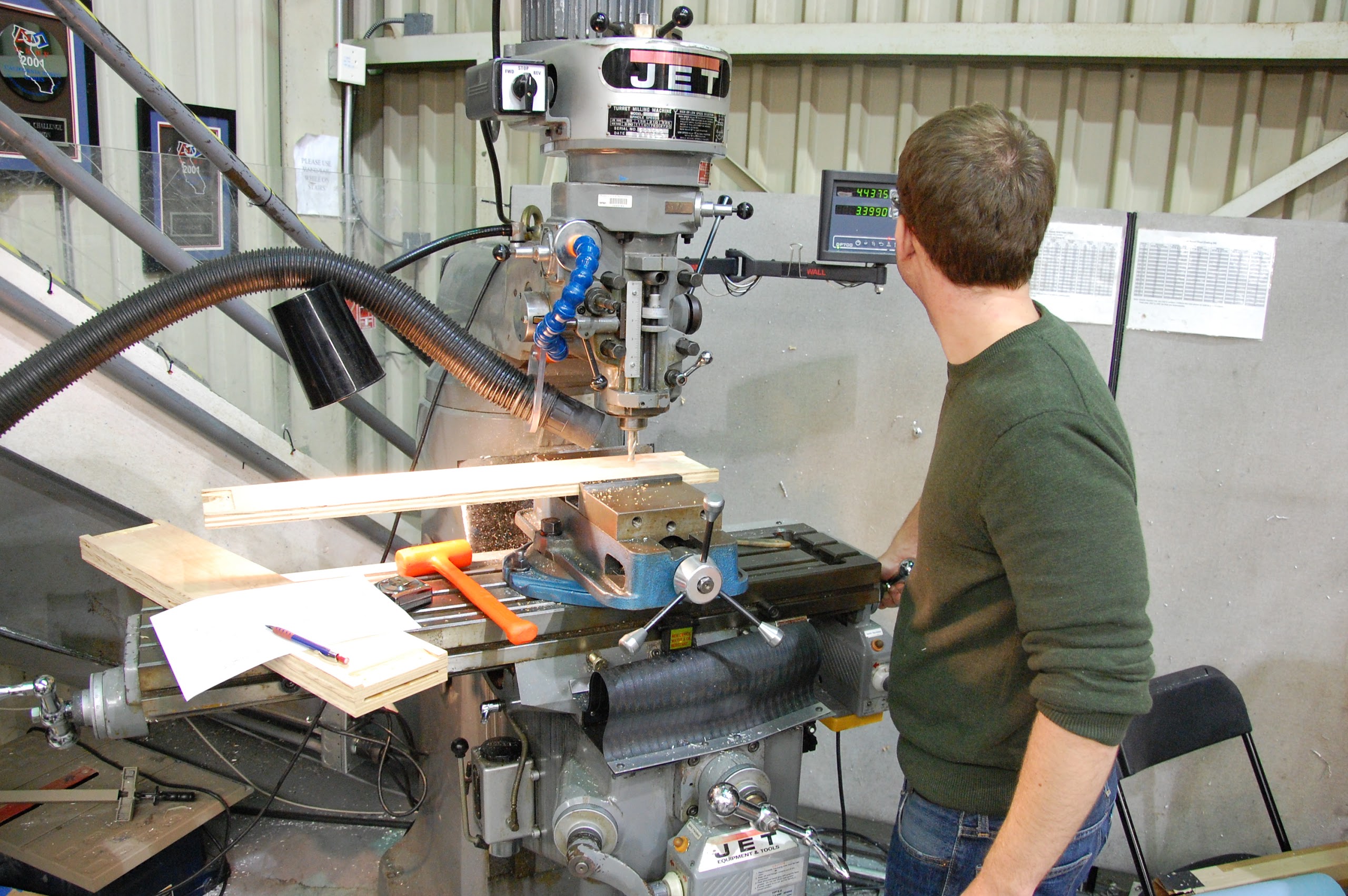
Lots of parts were manufactured today. The gussets for the superstructure were machined on the CNC and scotch brited by hand. Axle plugs were turned on the lathe. Pieces to be CNC milled later for the intake and the hood were cut on the horizontal band saw. Axles for the rollers were cut on the horizontal band saw as well. We also began programming the CNC to make the plugs that hold the superstructure subassemblies together.




Lab Maintenence
The manual mill’s starting motor is burnt out so it won’t work for now. Repairs were made throughout the day but it still doesn’t work. New parts need to be ordered for it. The CNC mill was leaking coolant today for an unknown reason. It will be looked into later in the week and fixed. The projector upstairs was mounted above the screen so it is no longer on the table.



Ordering:
Today we ordered many parts. Specifically we ordered the wiring supplies and the electronics to **finish the robot drive by Friday.**
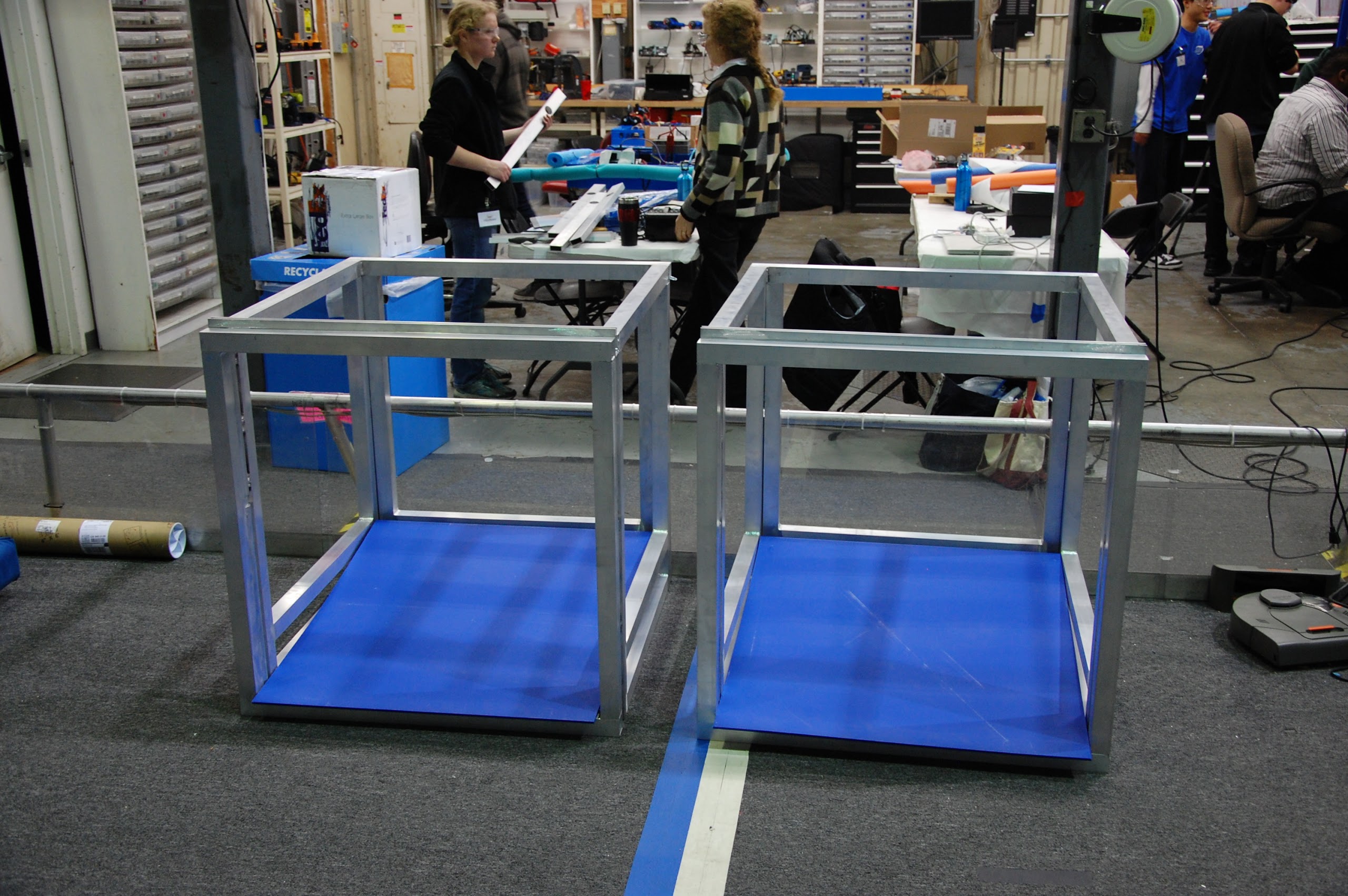
Field Construction
The wood covering the driver station finally broke after the repeated impact of balls landing in the goal. Modeled after the official field, PVC pipes were laid across other pipes to provide the same protection with less material. The PVC was attached to the goal and the I\-beam on the front wall of the lab. The zip ties may be replaced by something more sturdy.

Action Items
- Check trello
- When the electronics arrive, wire robot. Ask Mani or Torrance.
- CAD needs to be worked on and finalized, ask Mani or EJ.
- Manufacture more parts for robot.
- Make gearboxes to have the robot base drive by Friday.
Day 24 – Rest Day
Today was our third day of not meeting at the lab. Instead, here’s a couple snapshots of the last week at the lab.
First, here’s a video of Travis flying his hexacopter in the lab. This thing will come in handy when it comes time to make a robot reveal video.
And here’s an image of Mentor Colin using the mill as a jungle gym while trying to repair it.

Day 25: Waiting
By Dan Ngo ’17 and Eric Wang ’17
Disclaimer
The WiFi was down in the lab, and the shipment of anodized parts was delayed until tomorrow \(1/29\). As a result, not much work was done.
Programming

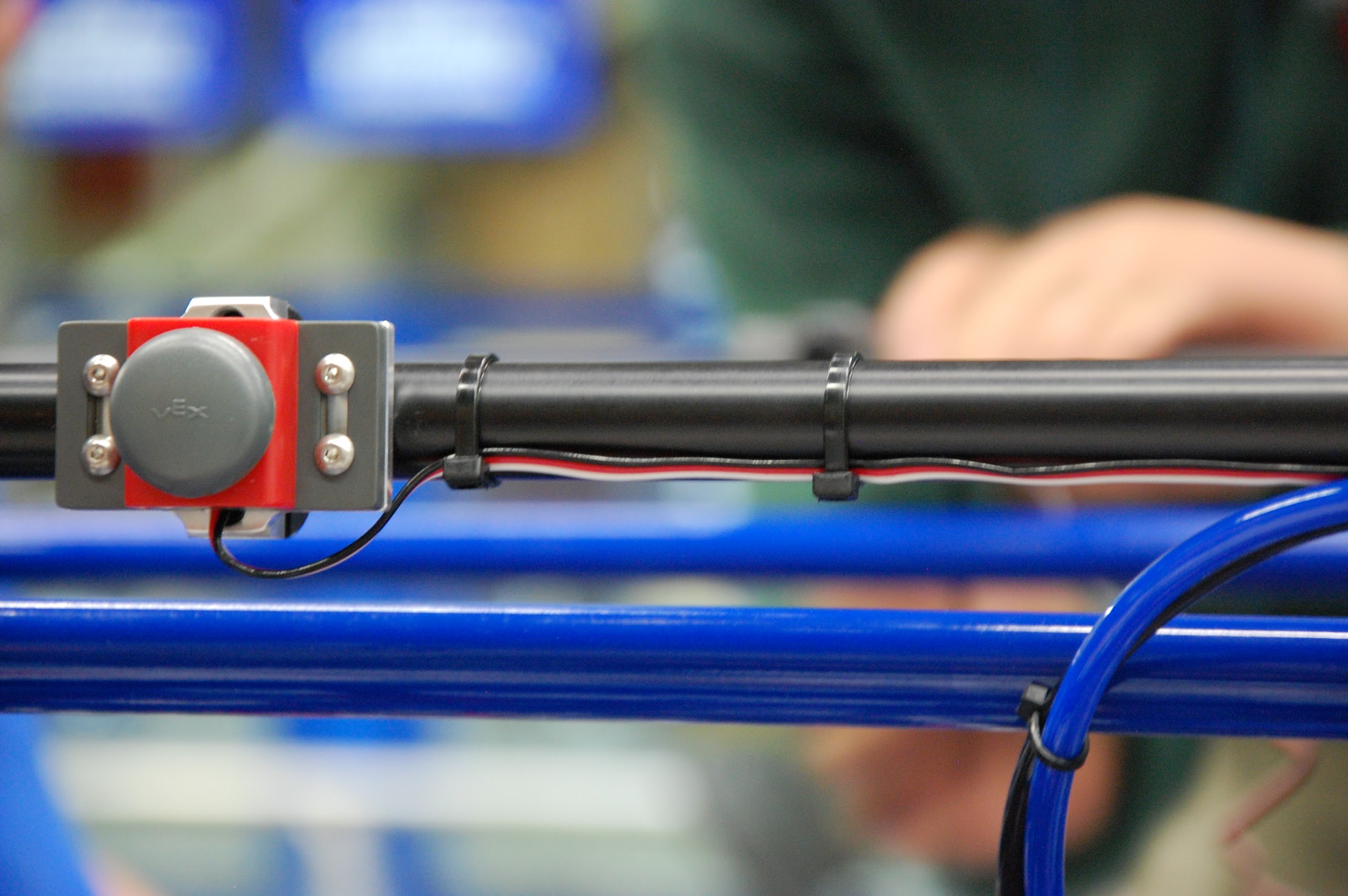
Today, the programmers tested a new \(Maxbotix MB1010\) ultrasonic sensor on the robot. This sensor will be used to determine distance to the player station wall in autonomous mode. The sensor was determined to be an improvement over the Vex ultrasonic sensor and two more were ordered. The programmers also continued programming Shockwave’s firing system.
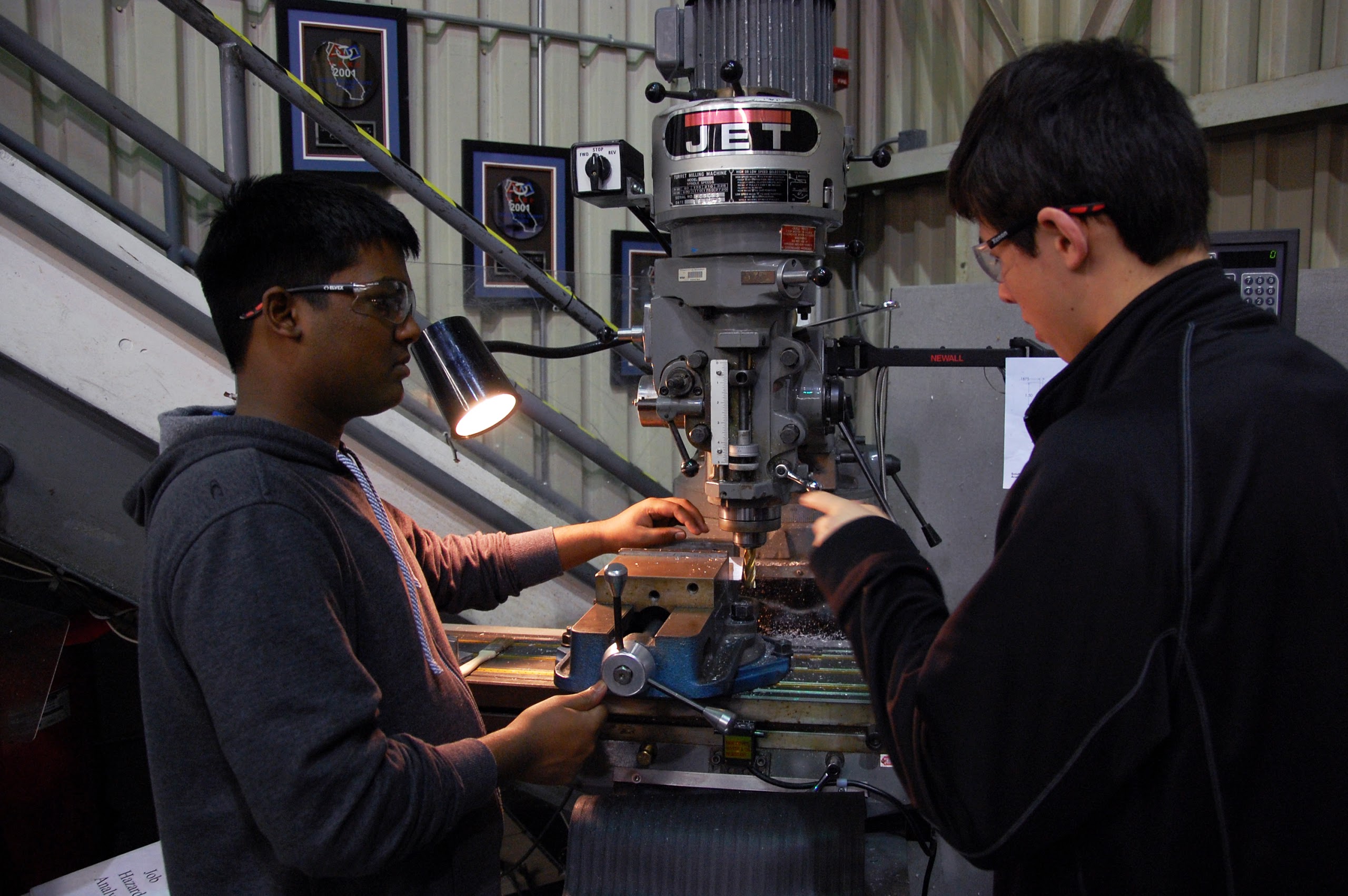
Machining
Also, members riveted the angled 1/8″ brackets to 1×1 tubes to begin constructing the final intake. Eventually, this part will be welded and powder coated. Additionally, students finished the first piece of the drill charger holder, and two more will be machined tomorrow.


Media
Students brainstormed ideas for the robot release video. If anyone wants to help, please ask Maxwell Yun.
Chairman’s Award Submission
Jeremy led a few students with the Chairman’s Award outline offline, and plan to finalize writing by the end of the week.
Action Items
- Continue brainstorming and developing video ideas with Maxwell
- Keep machining and assembling parts for back intake and superstructure
- See Trello
Day 28: Coming Together
by Brandon Wui ’16, Christian Jimenez ’16, and Joncarlo Avila ’16
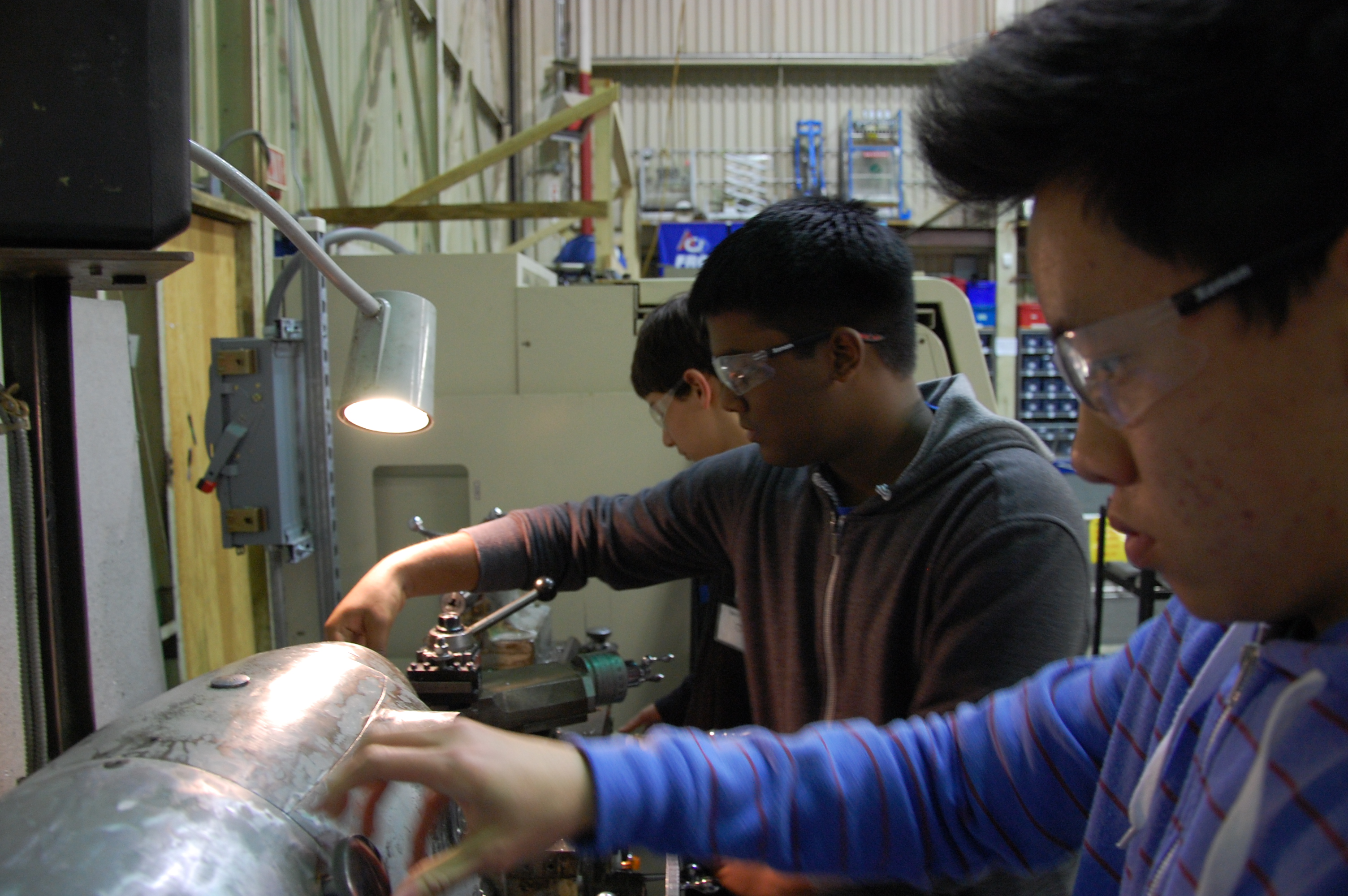
Machining
Today students machined parts for the intake and frame. They also worked on the lathe and band saw to cut pieces and face them for the superstructure. Finally, they drilled all of the holes based on the CAD model.

CAD
Today students attempted to add the hot goal sensor to the robot but could not find a good mounting spot. In addition, they updated the shooter design.
Awards Submissions
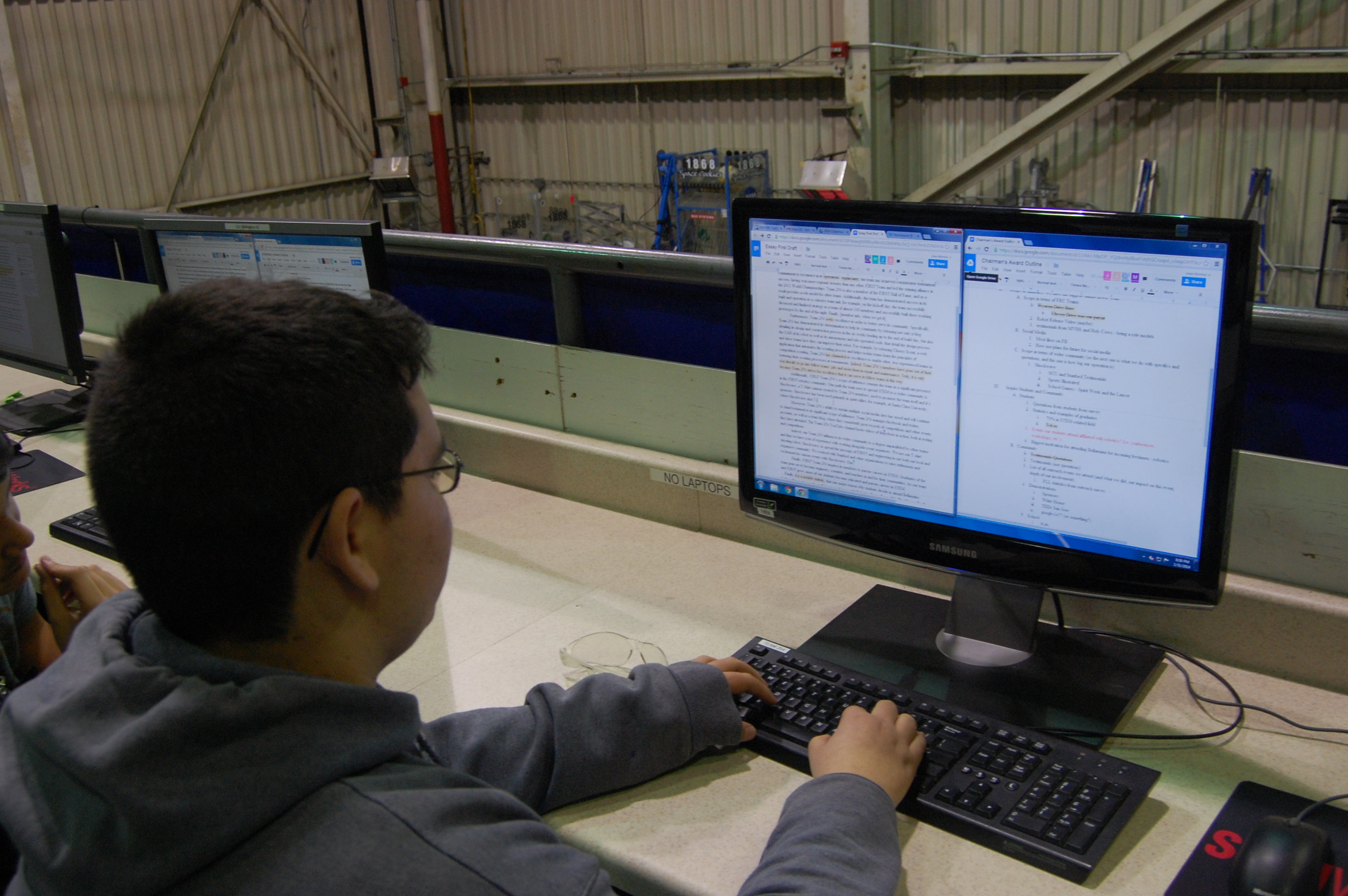
A group of students worked on the Chairman’s Award Essay. The outline is complete, and the first draft of the essay was finished tonight as well.
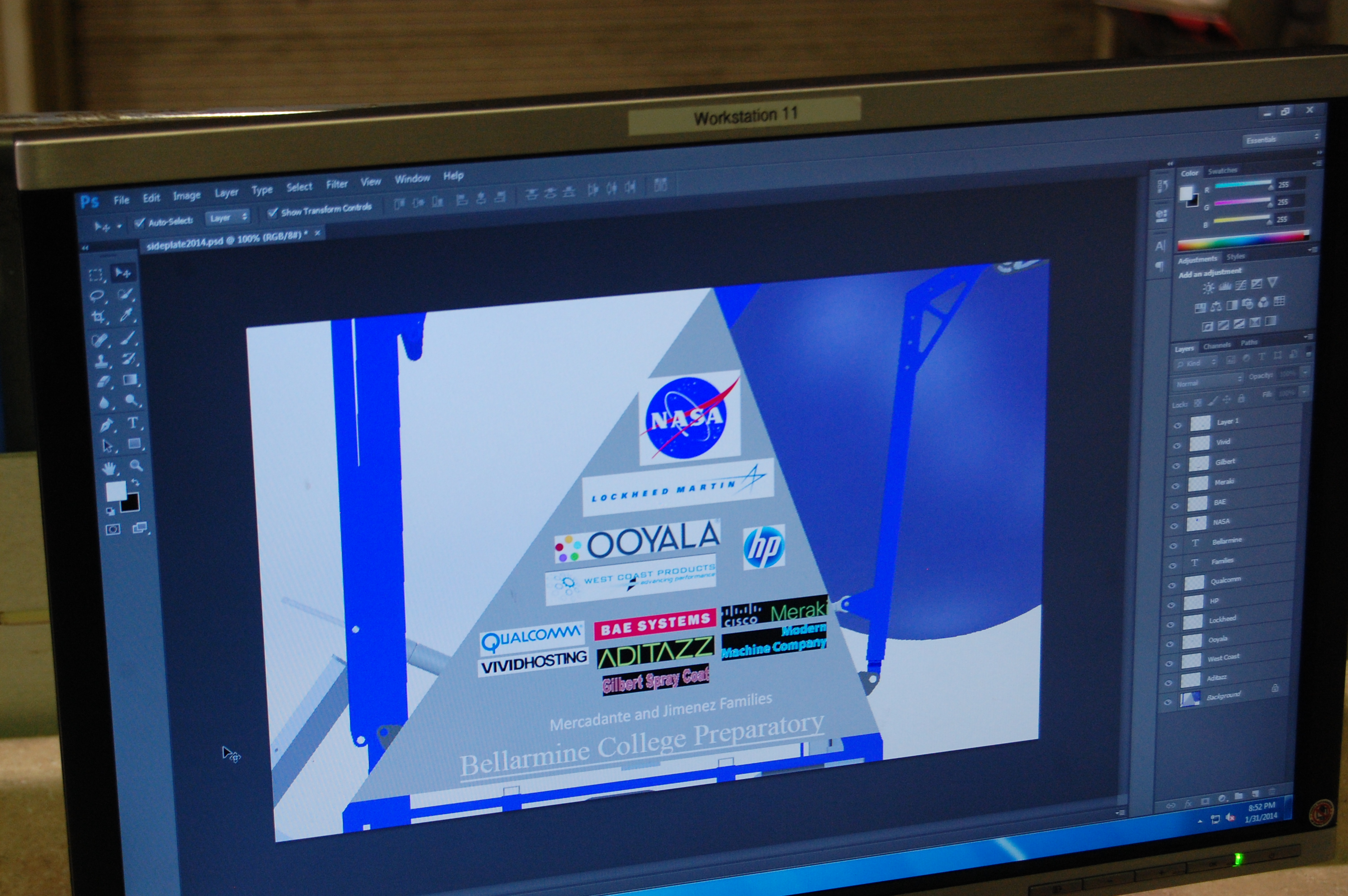
Graphic Design
Today, several people worked on graphic design projects for our team such as this semester’s shirt, the side panels for the robot, and the “Silicon Valley Invasion” T\-shirt for Waterloo \(in the spirit of 148 and 118’s “Texas Invasion”T\-shirt at last year’s Silicon Valley Regional\). A student also searched for good fonts for “The Cheesy Poofs.”
Action Items
- Check Trello
- Help Gregorio Magarelli to put together the “Silicon Valley Invasion” shirt on Illustrator
- Help Mani and EJ wire the drivebases tomorrow
- Happy Chinese New Year!

Day 29: Assembling Gearboxes
By Michael Simeon, Matthew Tran, Christian Bagamaspad, Stephen Pinkerton
Machining


Today, members manufactured shooter shafts, standoffs, spacers for gearbox, and crosspieces for “seal.” Additionally, they began detailing and manufacturing parts for the front and back intakes.
They also machined parts for the hood weldment assembly, which still need to get welded. Most of the other hood elements are still being designed.
The superstructure parts are done and ready to be welded. Part of the hood attachment still needs to be CNC’ed before sending items to the welder on Monday.

Gearboxes
Members also assembled gearboxes, replacing long standoffs with shorter ones. There were some issues after assembling them the first time where bearings didn’t fit properly. These issues were mostly resolved after assembling them again, but more carefully. There may be more issues with spacers that we need to investigate tomorrow. All in all, only 2 of the 6 gearboxes have been assembled \(the ones for the competition bot\).

Wiring
We started wiring late into the night and are being careful to do it accurately. The goal is to have this done very soon so we can continue driving.
CAD
After successful testing the v\-shaped popper, the team decided to go with the prototype, and are currently designing it in SolidWorks.
There was significant work done on the shooter and hood CAD. Members added more detail, as well as some shafts, spacers, and screws.
Programming
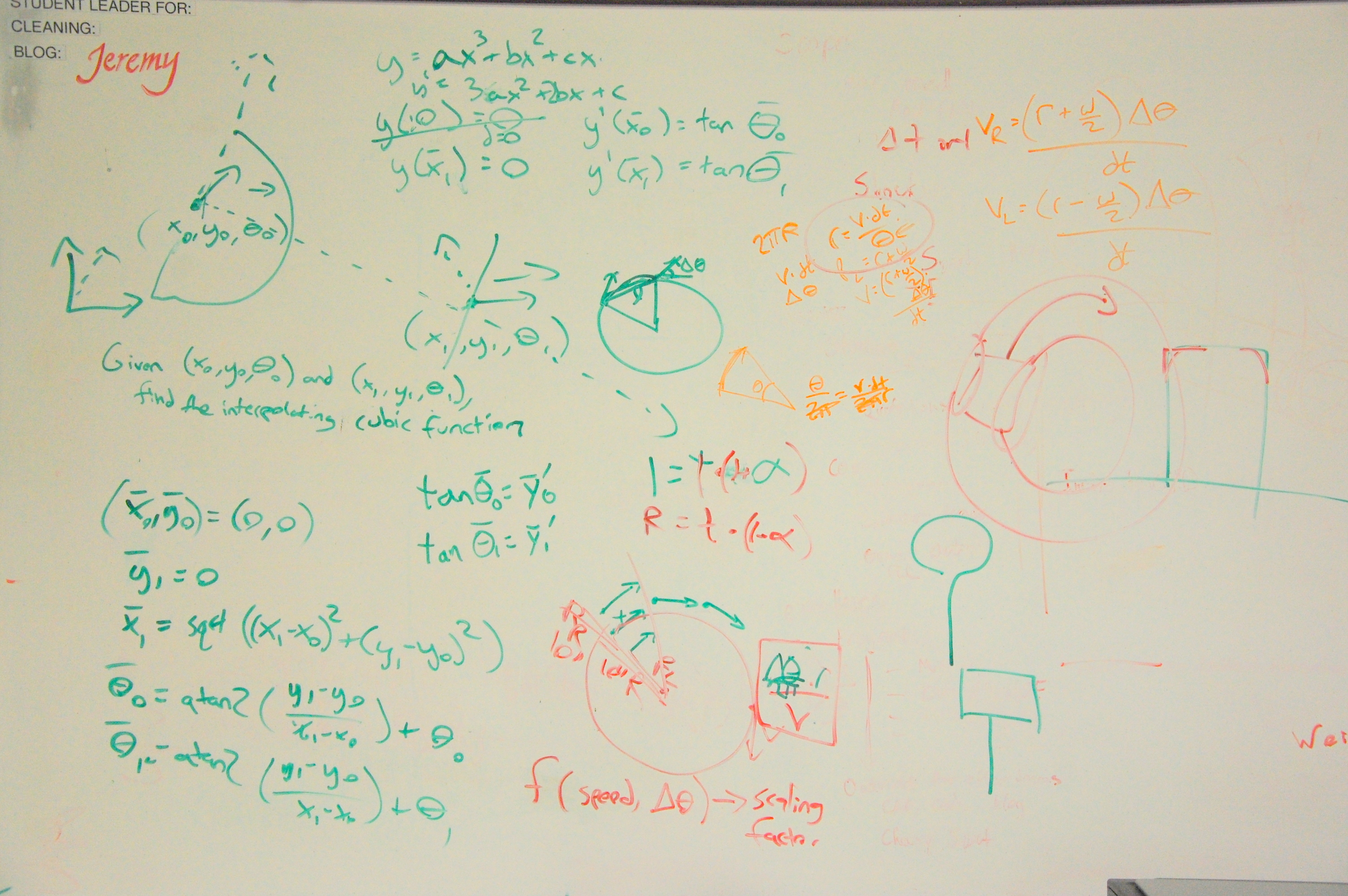
Today, the programmers worked extensively on cubic spline interpolation and trigonometric calculations. The purpose is to be able to turn smoothly and accurately. They implemented the calculations in a new Java project called TrajectoryLib, complete with unit testing. By the end of the day, they ironed out most of the bugs, and have not yet tested the code on the robot.
Moving forward, they’re looking to create a live position\-tracking page for the robot.
Graphic Design

Today, some students made progress on the official team shirt for this season by trying a new design based on the Aerial Assist logo. They also incorporated the logos of our current sponsors.
Game Elements

The team assembled a homemade truss \(instead of purchasing the official game element or buying actual trussing, which would take more than a week to ship\). Unfortunately, it is not completely sturdy and bows in the middle. It has not been hung up across the field yet.
Action Items
- Check Trello!Wiring drivebases
- Continue designing hood
- Debug and test turning code

Day 30: Machining, CAD, Game Elements, and Drive Base
By Clay Rosenthal
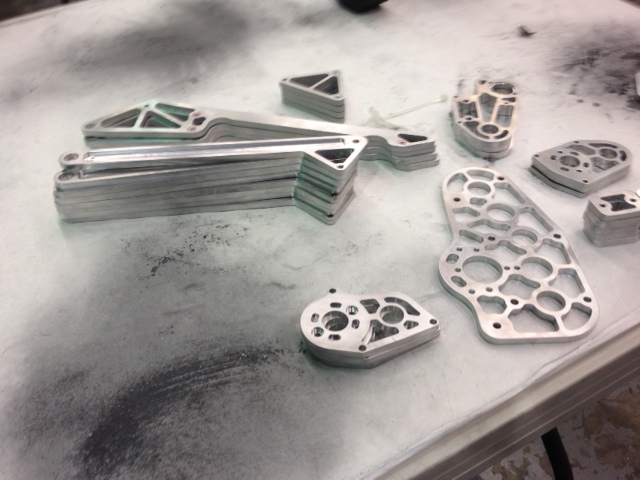
Machining
Parts of the superstructure were made today to be welded tomorrow. Parts to hold the pieces in place while being welded were also machined. The superstructure will be welded and powder\-coated soon. The parts for the hood and rear intake were also assembled and will soon be welded and prepped for powdercoating.


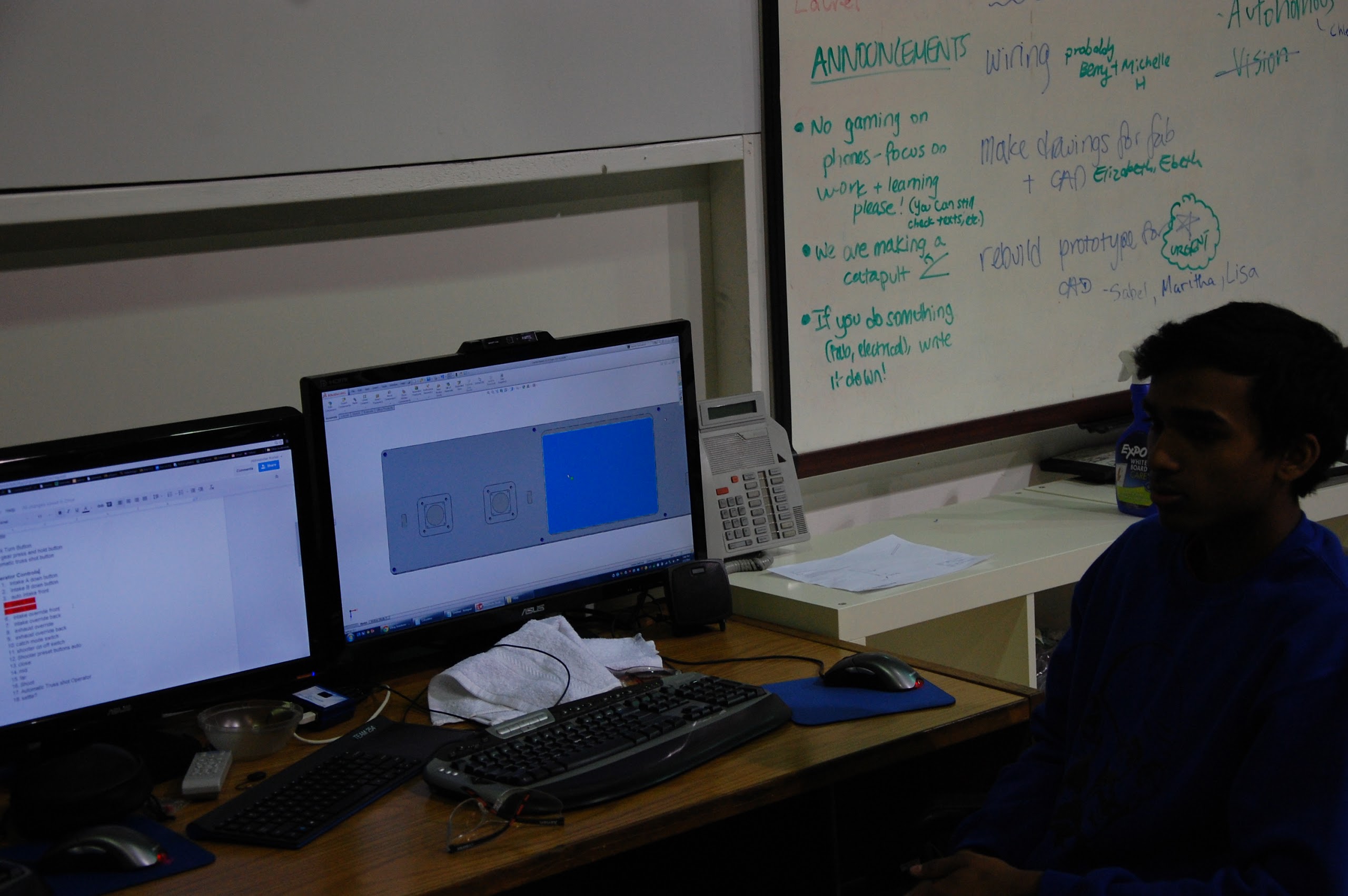
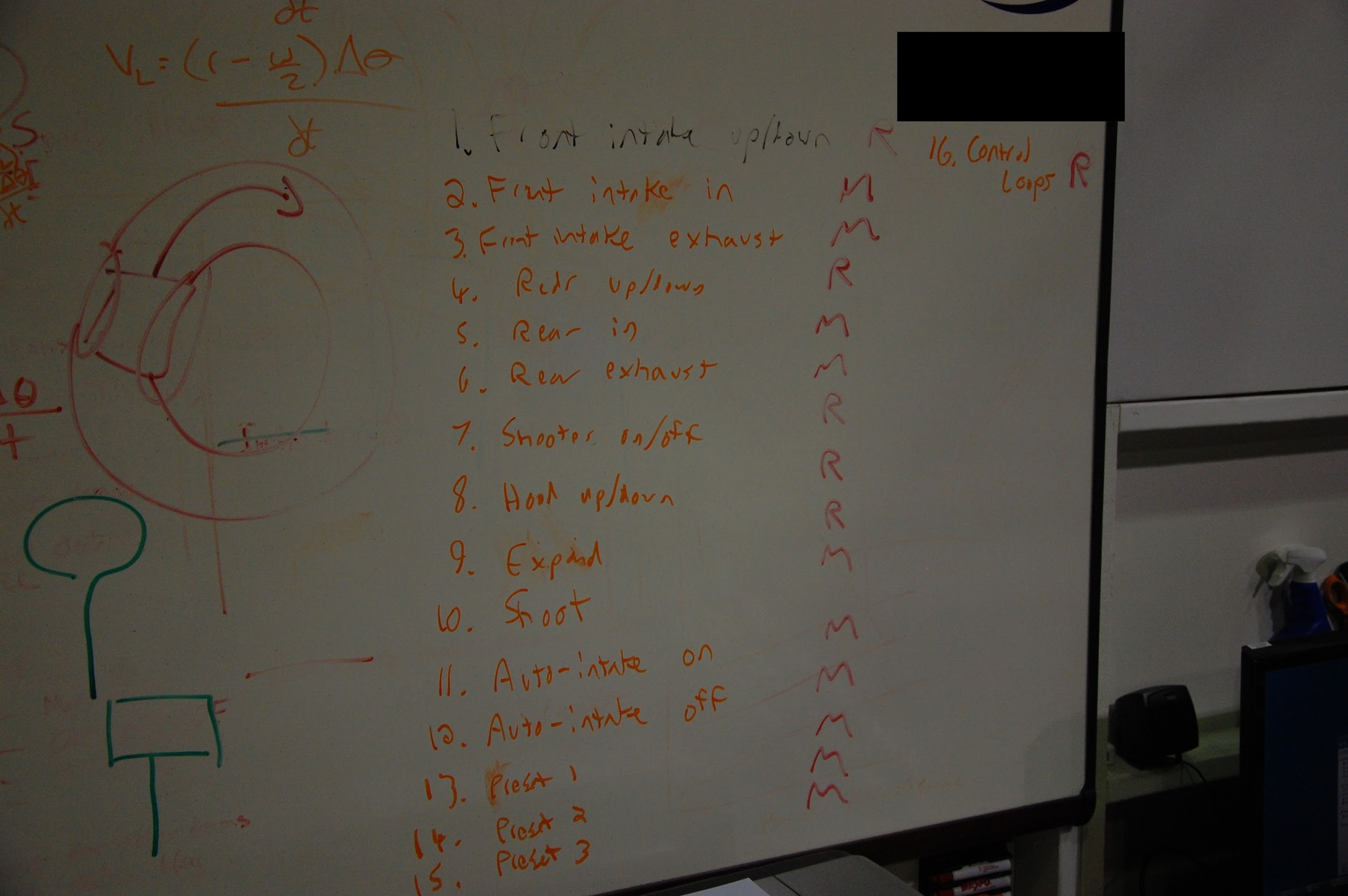
CAD
The clapper design was worked on today and is nearing completion. Locking pistons for the hood were also conceptually designed on today. A new control board with sixteen buttons is being designed. The buttons are described below \(‘R’ stands for rotational, or a switch, and ‘M’ is for momentary, or a button\).
Game Elements
The truss was worked on more today and is nearing completion. It is standing tall but still bending. The two halves from yesterday were attached together. It hasn’t been hung over the field yet and is still being completed outside.

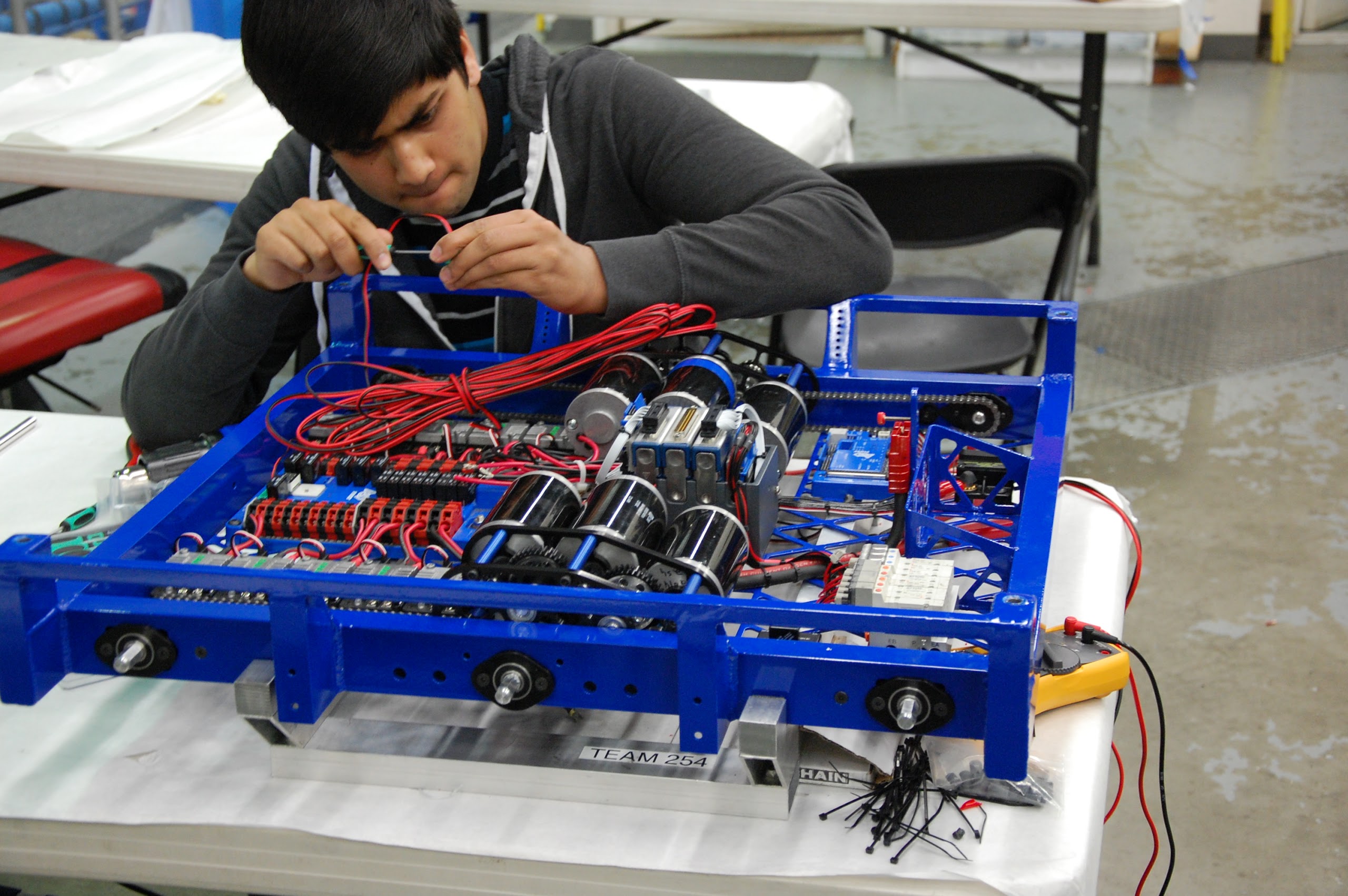
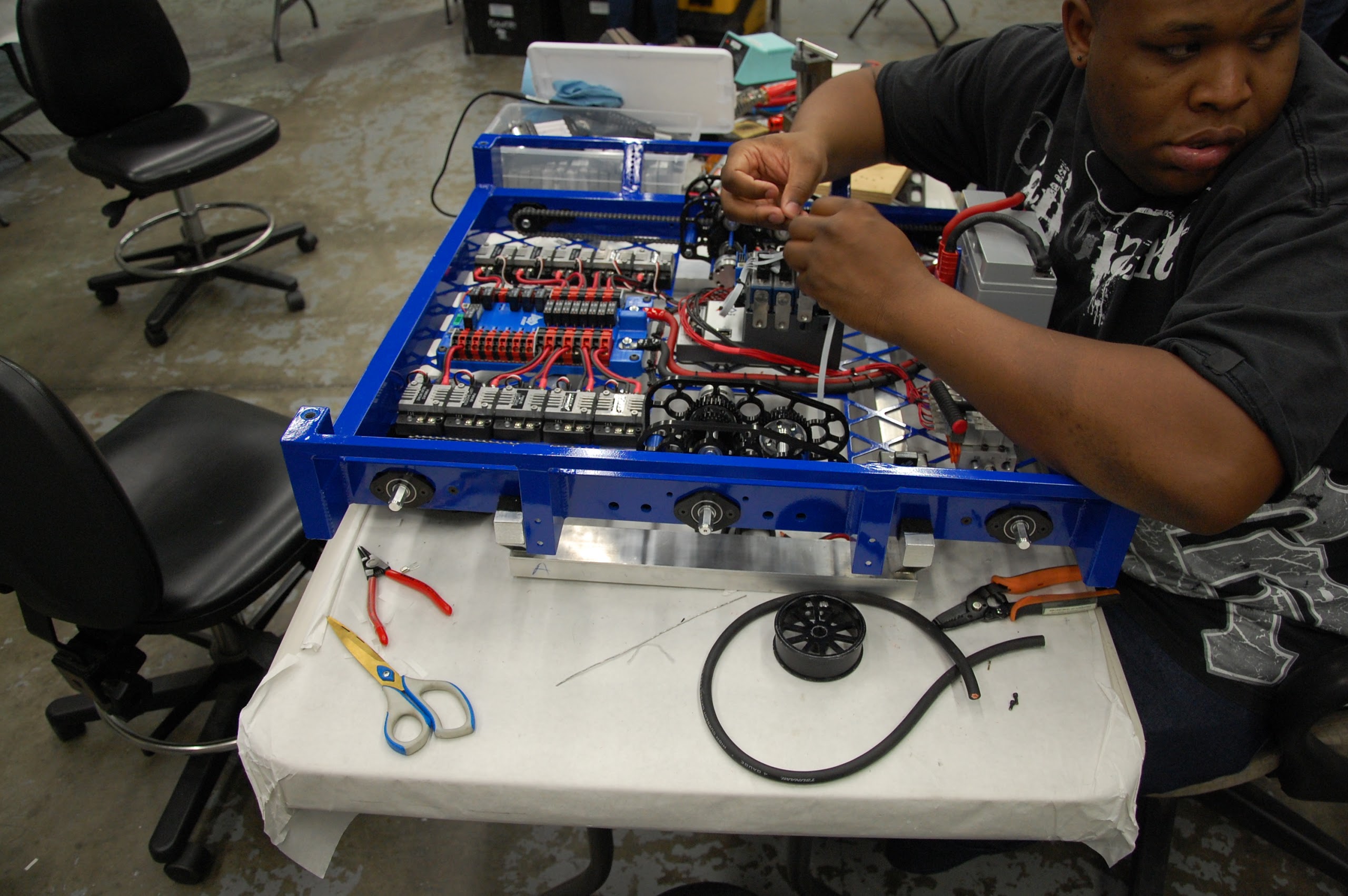
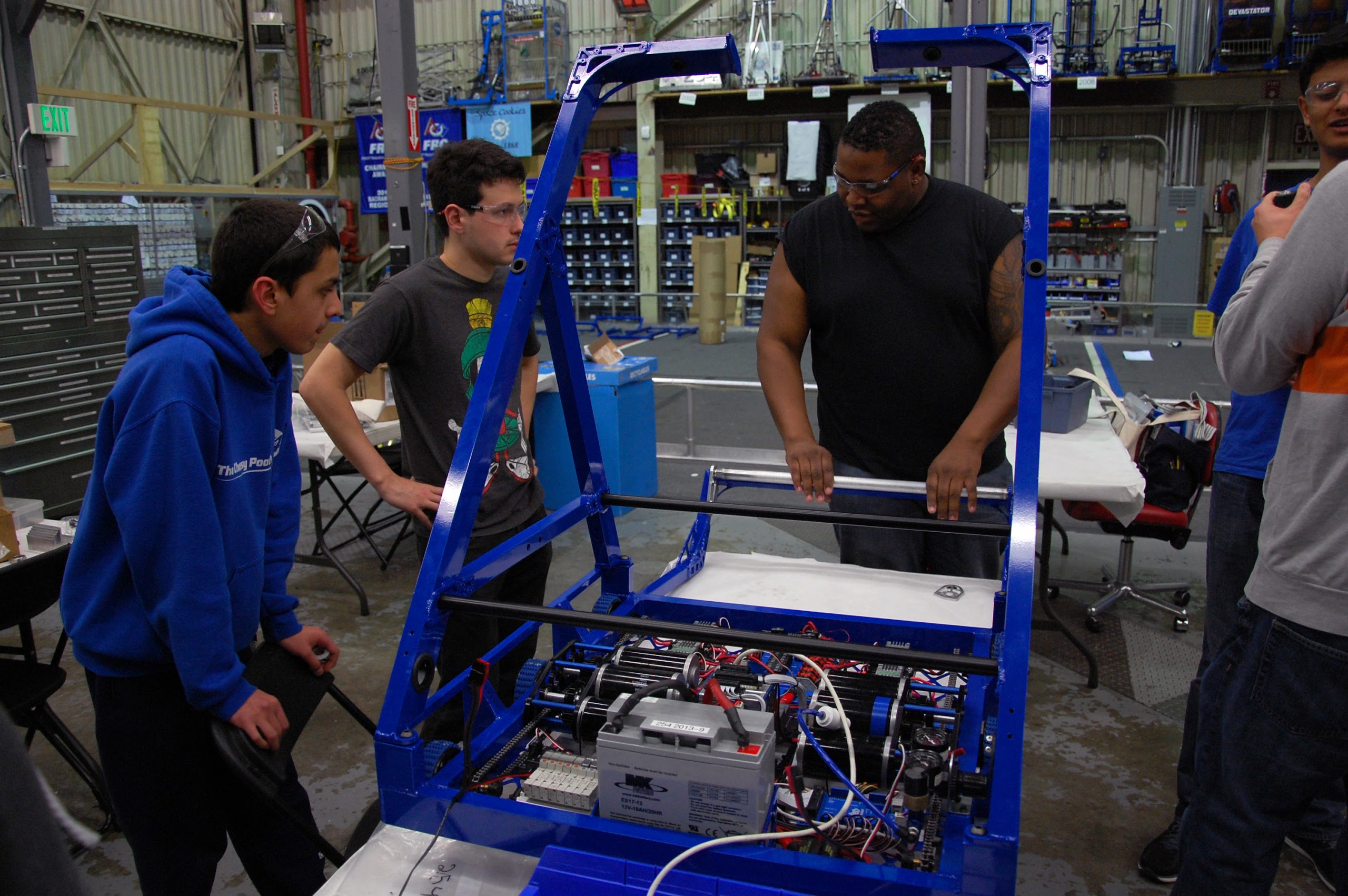
Drive Base
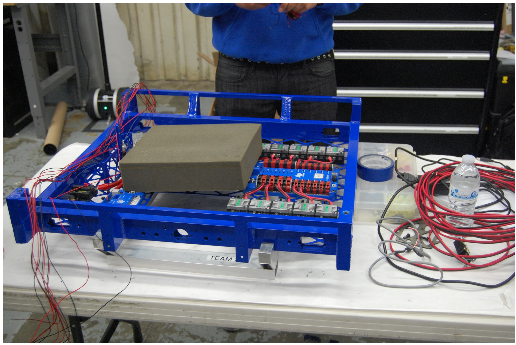
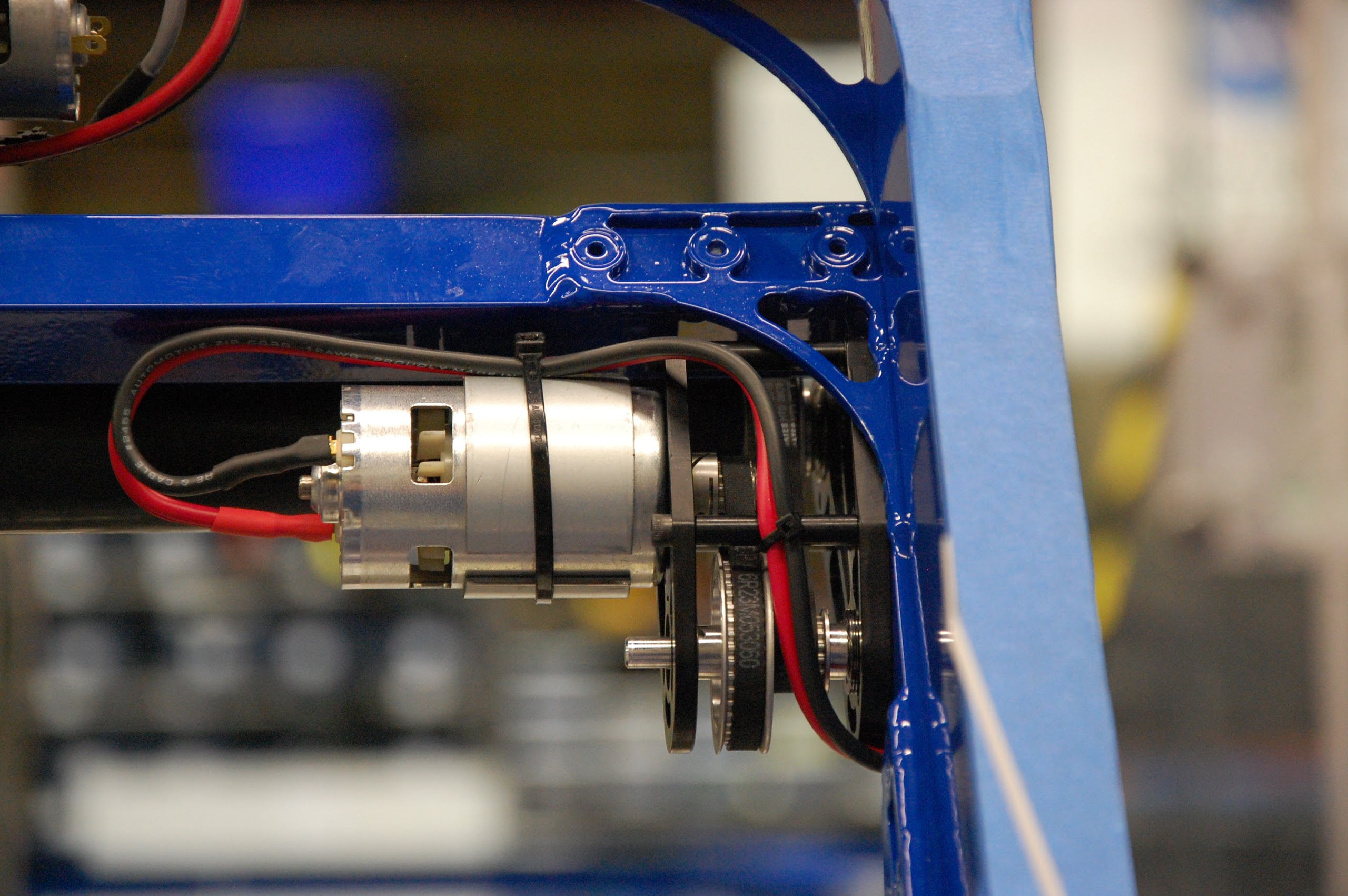
The competition drive base was wired and is pretty much ready for driving. The practice drive base is not far behind. The wheel axles now have chains attaching them to the gearboxes and the gearboxes on the practice drive base have CIM’s on them. New CIM’s have been ordered and will be put on when they arrive.
Action Items
- Wire andersons and drive gearboxes, Ask Mani
- Wire practice robot, Ask Mani
- Get everything ready to be welded
- Machine parts for hood, shooter, and intake gearboxes, ask Pat
- Finalize design for clapper, ask Colin
- Finish parts for shooter, hood
- Machine gearbox plates and piston mountsWire andersons and drive gearboxes. Ask Mani
- Wire practice robot. Ask Mani
- Get everything ready to be welded
- Machine parts for hood, shooter, and intake gearboxes, ask Pat
- Finalize design for clapper, ask Colin
- Finish parts for shooter, hood
- Machine intake gearbox plates and piston mounts
Day 31 – Rest Day
Today was another rest day. Have a weld video or two as we begin week 5!
Day 33: Finishing up machining and wiring!
CAD and Machining
The CAD is nearly finalized and only minor details were flushed out tonight. The various gearbox plates \(intake, front intake, rear intake, shooter\) were finalized and CNCd. Today we also machined new pieces for the shooter drive shaft. Super structure,and shooter were cleaned with scotch bright. Soon a bunch of parts will sent to be powder\-coated. Once all parts are back from powder\-coating, all we have to do is assemble the robot!


Drive Base Wiring
We finished up wiring the competition bot and are nearly finished wiring the practice bot.

Scouting
Today students and mentors began to discuss methods of scouting the game at regional events, determining objective metrics to compare robots. This will continue over time.
Prototypes
Today all the prototypes for this year’s challenge were disassembled and the parts put back in their containers. We no longer need the prototypes and they were just taking up space. However, they served their purpose.
Miscellaneous
We cleaned out and organized the Mentor and Office Supplies Cabinets to make our mentors happier.
We also now have made 2 of the plates for the cordless drill holder. More plates will be machined when we have time.
The robot cart had some extra rails attached to sides for strength. The entire cart was prepped for power\-coating.
Action Items
Finish machining parts for the shooter and front and back intakes. Send to power\-coating as soon as possible.
Finish wiring practice drive base.
Finish Chairman’s \(see Jeremy\).
Day 34: Scouting and Superstructures
by Eric Wang ’17
Machining
Today, students manufactured internal shaft\-like connectors for the superstructure. These were designed to give durability to the superstructure when under stress. Also, students machined gussets for the bumper.
Scouting
The scouting team began brainstorming a new method of ranking teams since the traditional method of OPR would not be effective this year. This is still in progress.
Lab Maintenance
The driver station windows were replaced with brand new polycarbonate windows. These were then meticulously cleaned.
Robot Construction
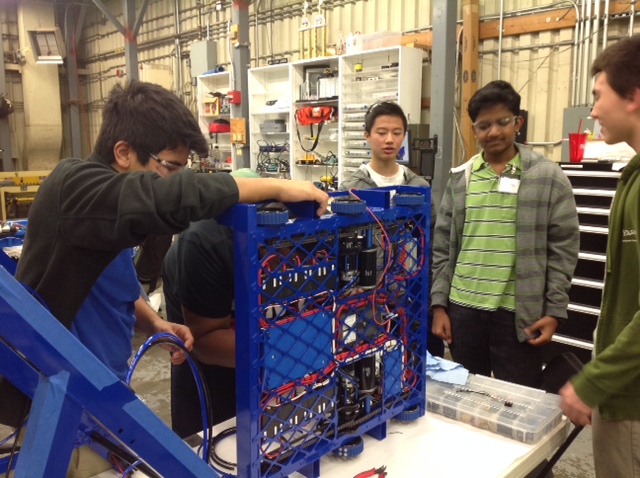
Students and mentors mostly focused on wiring today. The regulator and the router in the drive base frame were wired, along with the wheel encoders. Also, students drilled holes through the superstructure and routed wires and pneumatic tubing for the shooter and other cylinders.


CAD
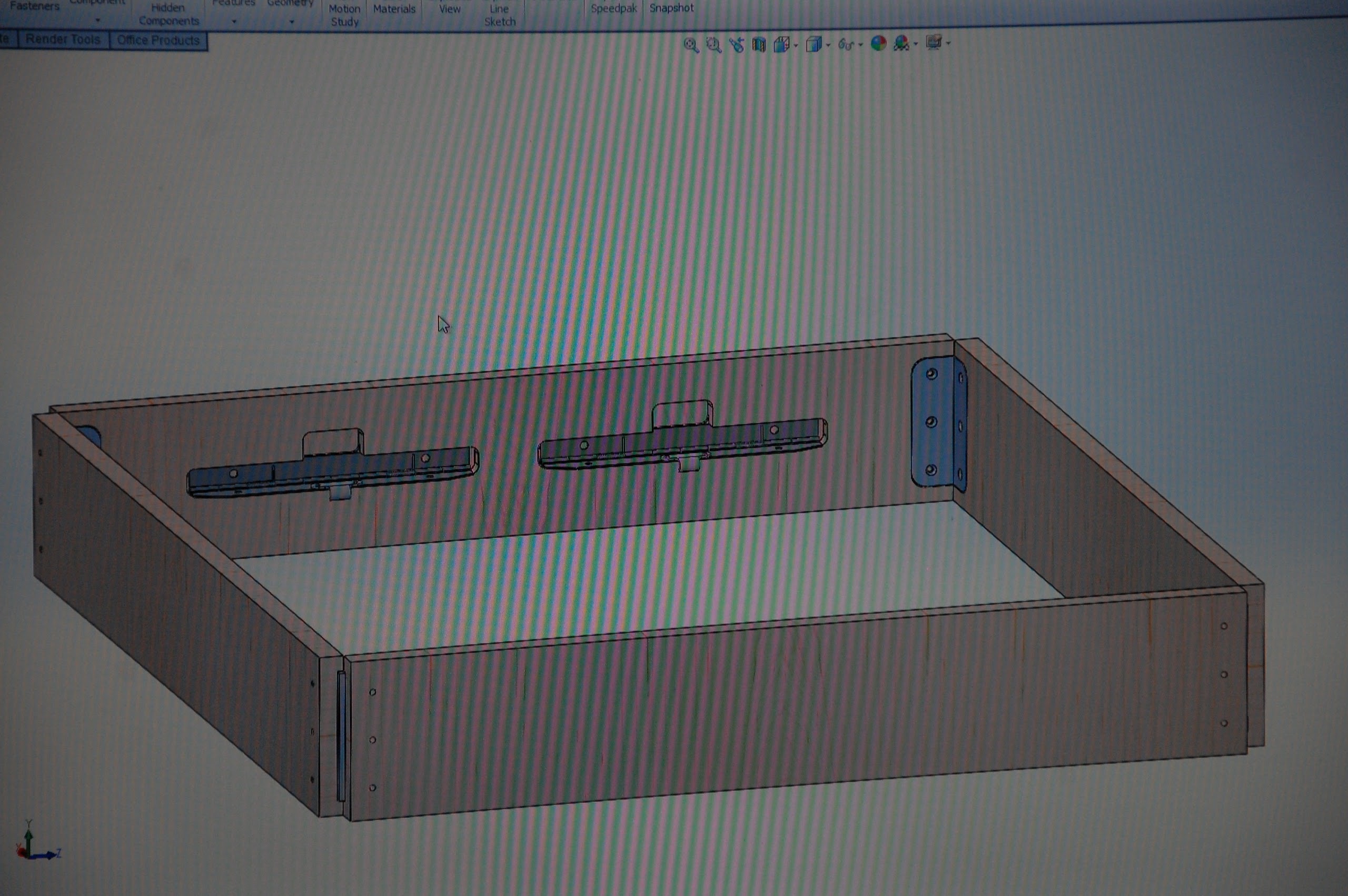
The CAD team completed part drawings for the robot bumper connectors.
Chairman’s Award Submission
The awards submissions team edited part of the entries that they created previously for the Executive Summary prompts and the major essay \(second draft\). Also, they searched for evidence in previous submissions and changed previous answers to be more direct, so that it would enhance the reading experience for judges.
Programming
The programmers busied themselves fixing bugs and issues in the current iteration of the code. This also involved uploading several versions of the code to the 2013 practice robot.

Action Items
- Work on the scouting system: see Art Kalb for details
- Edit Chairman award submission: see Jeremy Tanlimco for details
- Construct the robot with Abhi and Mani
- Debug code with Brandon
- Check the Trello
Day 35: Wiring and Writing
by Eliot Smullen ’16
Graphic Design
Several students continued to brainstorm a Waterloo-specific T-shirt. Some of them began considering the issue of whether the back should be left blank if the design on the front were of sufficient size and graphic complexity. The rest brainstormed catchy slogans such as “From C(ali) to shining C(anada).”
Machining
Today’s machining consisted of creating pulleys for both the intake and the shooter. Also, students begun machining parts for the bumper. The team plans to work on flywheel for the shooter.
Robot Construction
Today, students and mentors worked on constructing the intake for the practice robot. The competition bot has its intake installed and its pressure gauge wired. The practice bot will soon follow.

Award Submissions
Today, students worked on our chairman’s submission. However, they still need to edit and add evidence to the essay portion of the submission. In addition, some students began work on the Entrepreneurship Award Submission by matching up sections from the Business Plan written in the first semester with sections and prompts in the Entrepreneurship Award criteria.
Action Items
- Assemble robot with Mani and Abhi
- Wire sensors with Mani and Tom
- Programming with Kevin and Brandon
- Make bumpers
- Check trello
Day 36: Practice Robot and Release Video
By Luke Gardner
Machining
Students machined wood for the bumper and the pool noodles arrived. Parts for the control board were machined for later construction.
Robot Construction
Work on the practice robot continued including more wiring and work on the gearboxes. The pneumatics for the pinniped were built and attached to the robot. The gearbox for the intake was attached. Work on the bumpers began late in the night.

Programming
Our programmers worked on a team hours app, and others also researched and brainstormed the LEDs for the pit in Waterloo.
Later in the night the programmers worked on the mechanisms within the robot code.
Release Video
Students brainstormed and started writing the script for the release video, as well as collecting pictures and videos to be used.
Miscellaneous
More catchy slogans were thought up to be put on the Canada T\-shirts such as “Get ready to Waterlose” and “We came for the bacon and stayed for the robots.” The outside wood was organized according to size and dimension. The shed is mostly organized now and should not have to be disturbed until packing.
Action Items
- Assemble robot with Mani and Abhi
- Build Bumpers (cut pockets into wood and finish marking up Cordura)
- Programming with Kevin and Brandon
- Check trello
Day 37: Construction and Testing
by Abhishek Aditham ‘15
Bumpers
Today, students continued construction of the bumpers. On the pieces of cut Cordura they marked 4 inch by 12 inch boxes onto which 254’s team number will later be embroidered.

Machining
Some students machined two pieces of tubing that will be used to hold up the shooting arm on the robot. These will temporarily be used for testing purposes until pistons will replace them.

Robot Construction & Testing
Some students and a mentor worked on the competition robot by attaching and organizing pneumatic tubing on its drive base. Later on, the mentors and a group of students began testing the robot’s shooter and were able to score into the high goal.
Award Submissions
Today a group of students continued writing and editing 254’s submission for the Chairman’s Award. A few other students created a to do list stating what would need to be done to complete the Media and Technology Innovation Award.

Action Items
- Assemble robot with Mani and Abhi
- Programming with Kevin and Brandon
- Check trello
Day 38 – Rest Day
Today was a rest day at the lab. Here’s some slow motion videos from the past few days of testing at the lab. One week to go…
Day 39: Finish Assembly
by Quentin Delephine ’17
Assembly
Today the team spent a lot of time assembling both the practice and competition robots.
Students added rubber bumpers to the superstructure using rivets. This prevents the front intake from hitting the superstructure and damaging it.
Wiring and Pneumatics
Students helped finish plumbing the pinniped on the competition robot and Practice robot. The two sides of the pinniped can be fired independently. Students also plumbed the cylinders on the gearbox for the competition robot.
Truss
Students assembled the truss, and mounted it on the field.

Testing

The drive base and the pinniped were tested. They worked well and the drivers were able to score in the low goal.
Action Items
- Finish attaching rollers (and motors) to both robots
- Add bumpers to both robots
- Improve Truss mounts and bases
- Complete Plumbing and Wiring

Day 40: Intake and Truss
by Matt MacDonald ’17
Today, our team worked to address some problems in our intake and truss. We also worked on programming an important system in our robot.
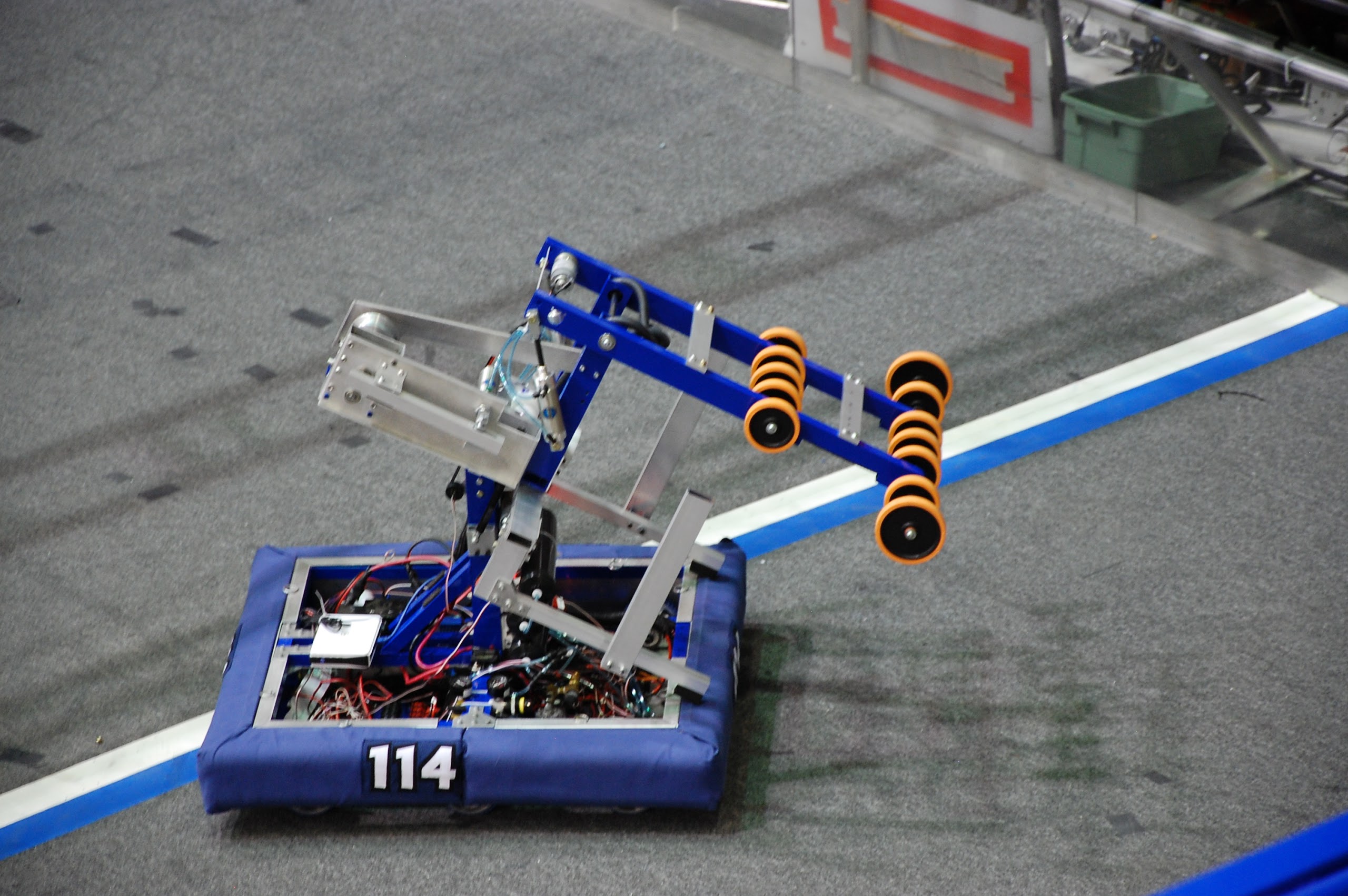
Intake
Our team worked to install and improve our intake system. First, our team changed out the bent arms in our robot and installed some gearboxes and motors. Next, we drilled grommet holes and finished up some wiring. Lastly, we used pneumatic wiring to further improve our intake system.

Some students created intake holders very important to the success of the robot.
Truss Improvements

In order to make the truss more stable and reliable students made a bar that would ensure that it would work correctly.
Programming
The robot needed a system that would allow it to quickly ready its ball to pass or shoot for a goal. The team programmed the robot so it could quickly move through several pre\-made states and shoot at a goal.
Action Items
- Assemble robot with Mani and Abhi
- Programming with Kevin and Brandon
- Finish bumpers
- Finish truss stabilizer
- Continue control testing
Day 41: Scrimmage Prep
Field Construction
Work began on assembling the field today. We first opened up all of the shipping pallets containing the field elements and laid them out on the field. The assembling crew started with the low goal. They assembled the two blue low goals and then moved onto the blue high goal. They assembled the goal including the overhang to protect the drive station. They then attached the poles on the truss that represent the limits of the field above the truss. The field team also assembled one of the podiums for the ball to rest on behind the driver station. A few people attached another stabilizing to the base of the polycarb at the end of the truss.





Wiring
The wiring team, lead by EJ and Mani, wired the banebot motors that drive the intakes as well as the encoders attached to them. They also wired the VEX button sensors that keep the ball stationary in the intakes. For driving and testing purposes, they wired a single pneumatic tank to the comp robot.

Bumpers and Driving
The bumpers were successful attached to the practice robot to allow the robot to be driven around and tested.
Coding
The programmers fixed and calibrated the encoders on the drive base
CAD
Travis made some minor changes to the bumpers in the CAD
Manufacturing
Parts for the intake encoder mountings and the hot goal sensor mountings were manufactured today. The wooden sides for the bumpers were also manufactured.

Action Items:
- Finish constructing field
- Finish building robot
- Talk to Tom or Jared about programming
Day 42: Scrimmage Preparation
by Vidur Maheshwari ’17 and Eric Wang ’17
Cleaning Routine
Since the scrimmage will occur on Day 43 and 44, today’s work was primarily cleanup. Most teams in the area will attend; therefore, today’s main goal was to make the lab as presentable as possible. The team finished assembling the whole field to be operated on tomorrow. 254 is very excited and looks forward to tomorrow’s scrimmage! Here is a list of the cleaning procedures today:
Parts Inside Shed
Students started organizing pieces of wood and scrap outside. This was for the scrimmage teams so that they could find parts easily and better make use of our facilities.
Barrage
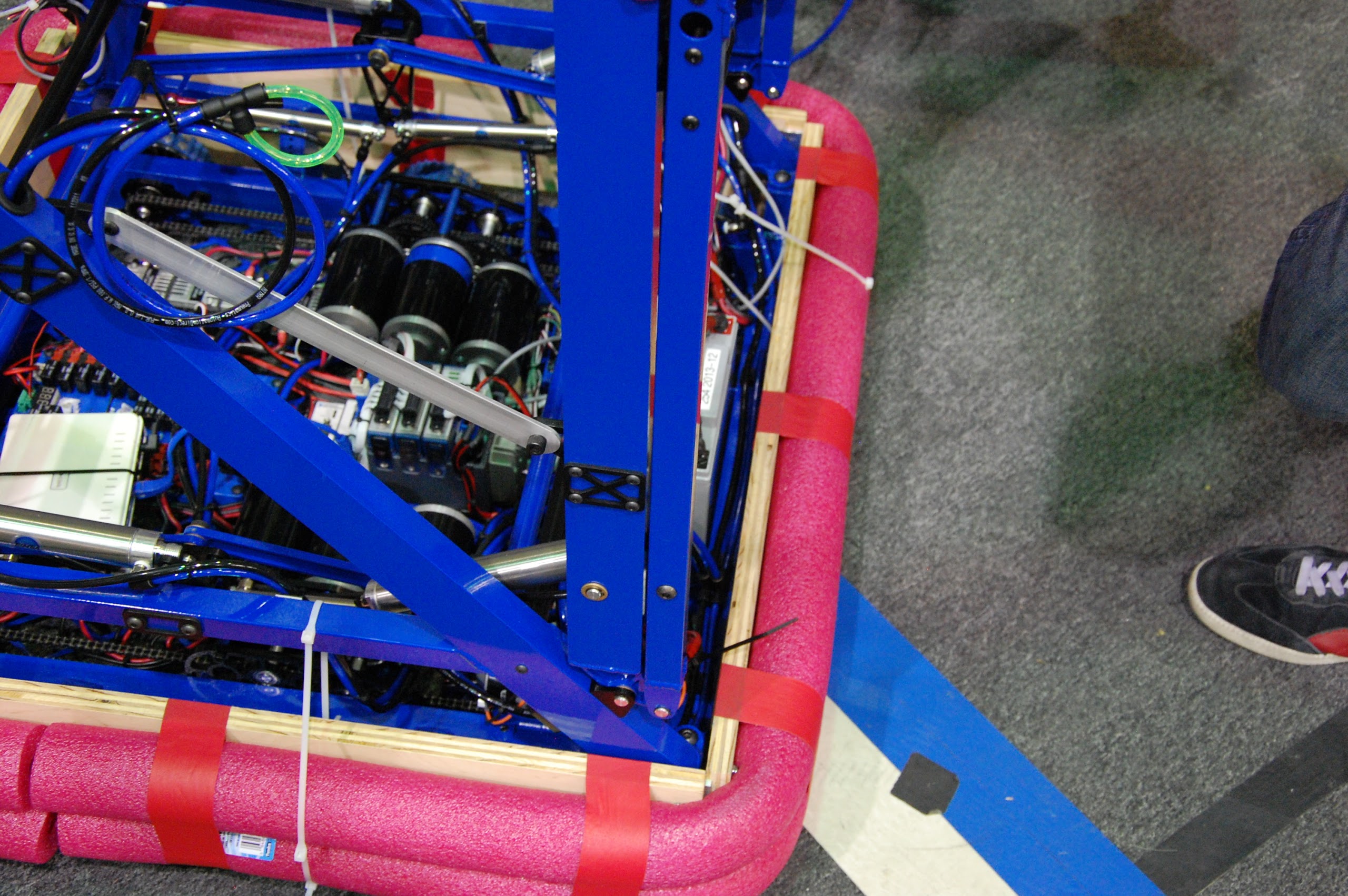
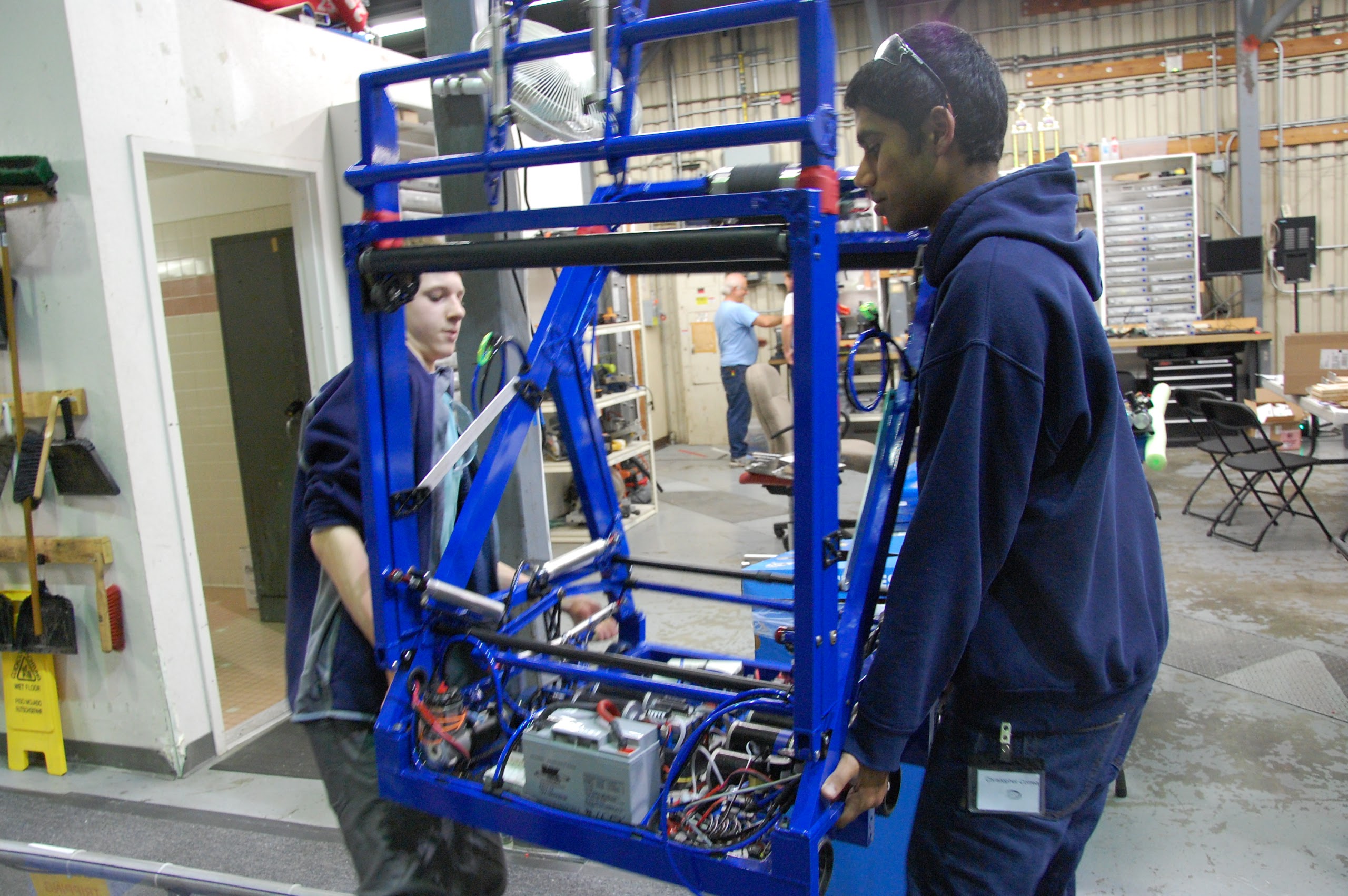
The current 2014 robots, Barrage and practice Barrage \(P\-Barrage? Parrage?\), were carefully and safely brought to tables on the upper floor of the lab.

Battery battery
Also, because there will be many teams on day 43 and 44, the team organized the battery charging area. During the scrimmage the team will not only be charging other team’s robots, but will give its own batteries to other teams so that they can more efficiently drive and test their robots.

Past Years’ Robots
Students packed the twin Overkills as well as the 2012 robot Skyfire into a mentor’s car to be transported to the VEX lab so that they would not contribute to the chaos in the scrimmage.
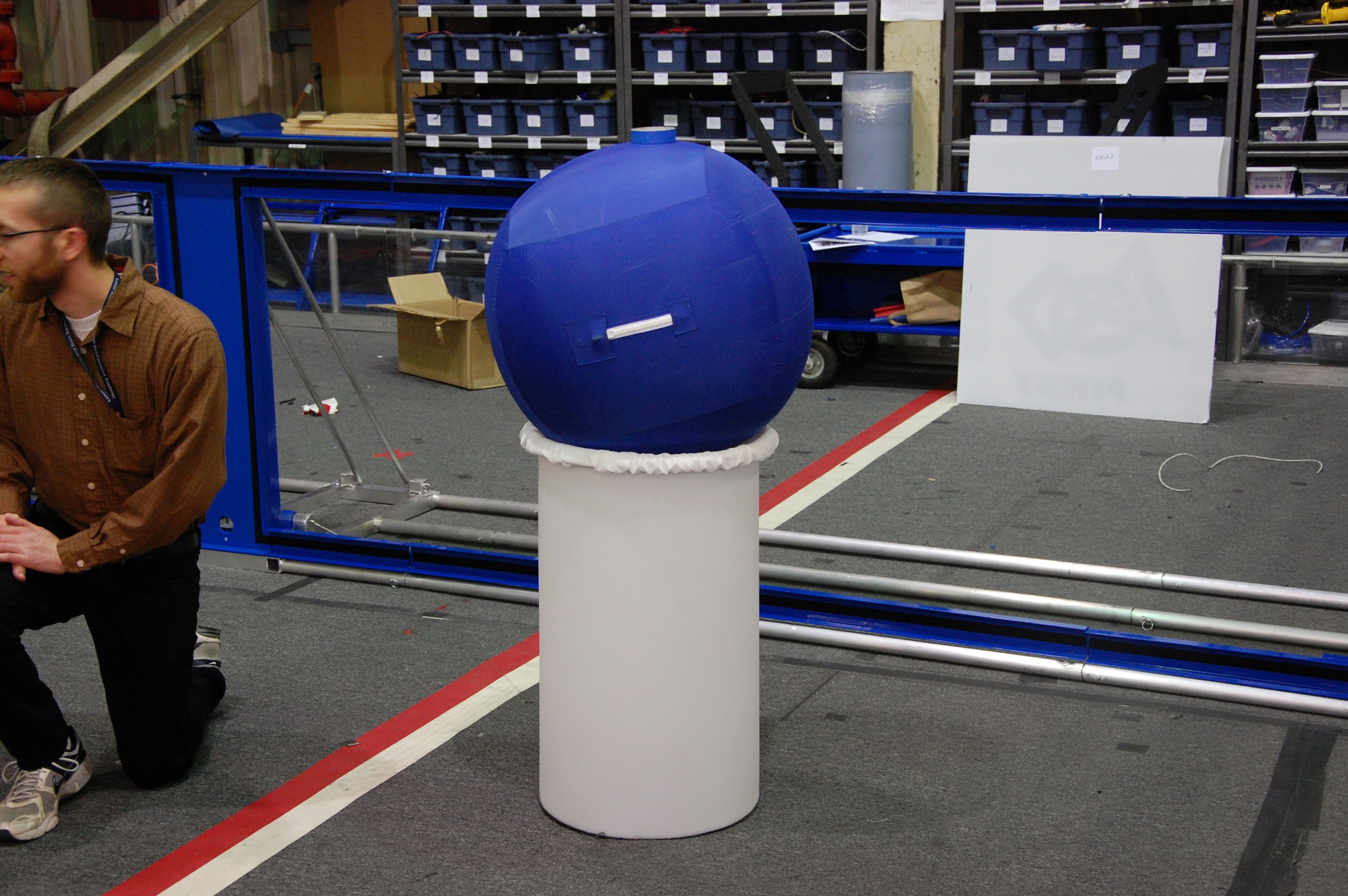
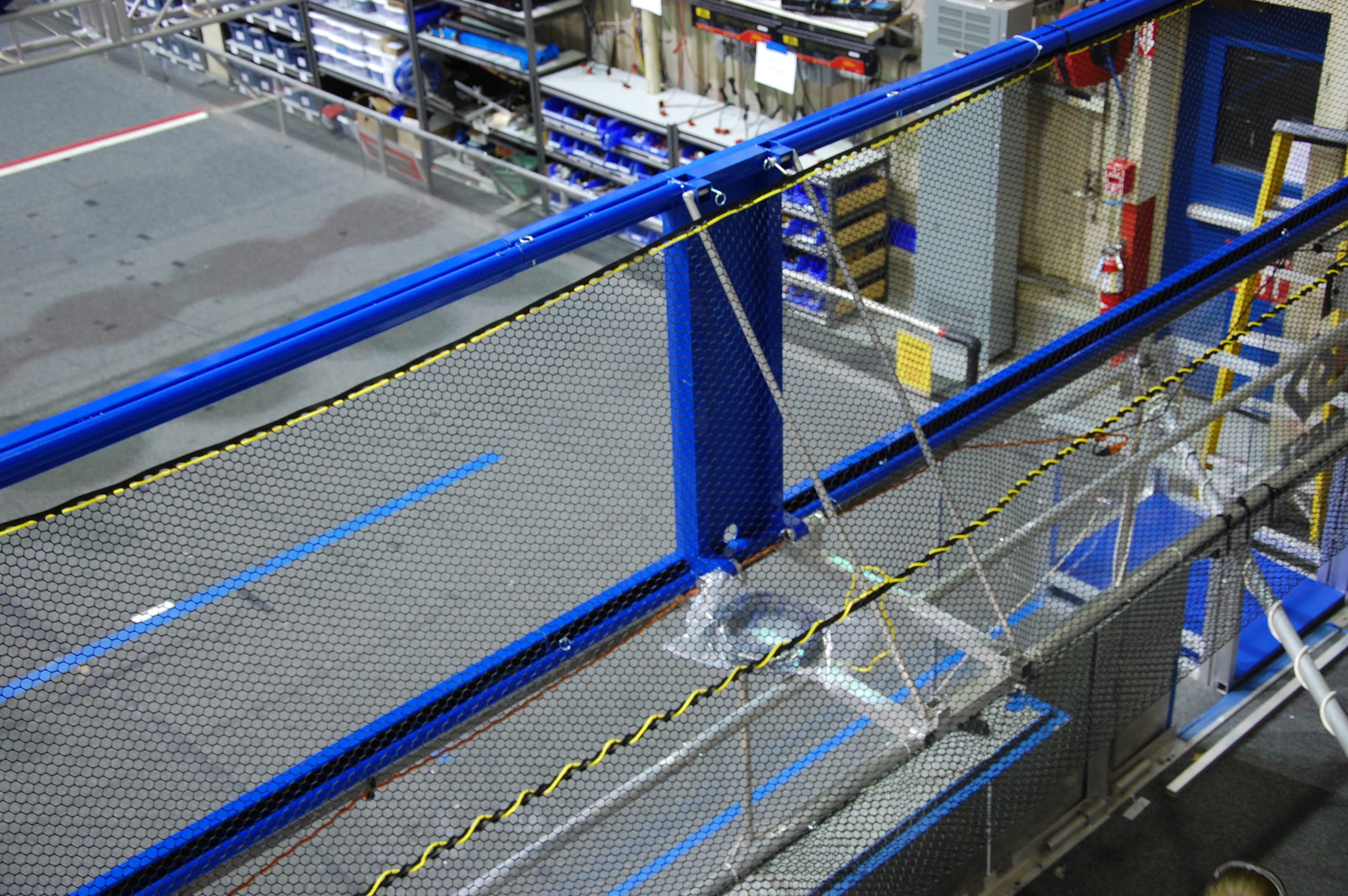
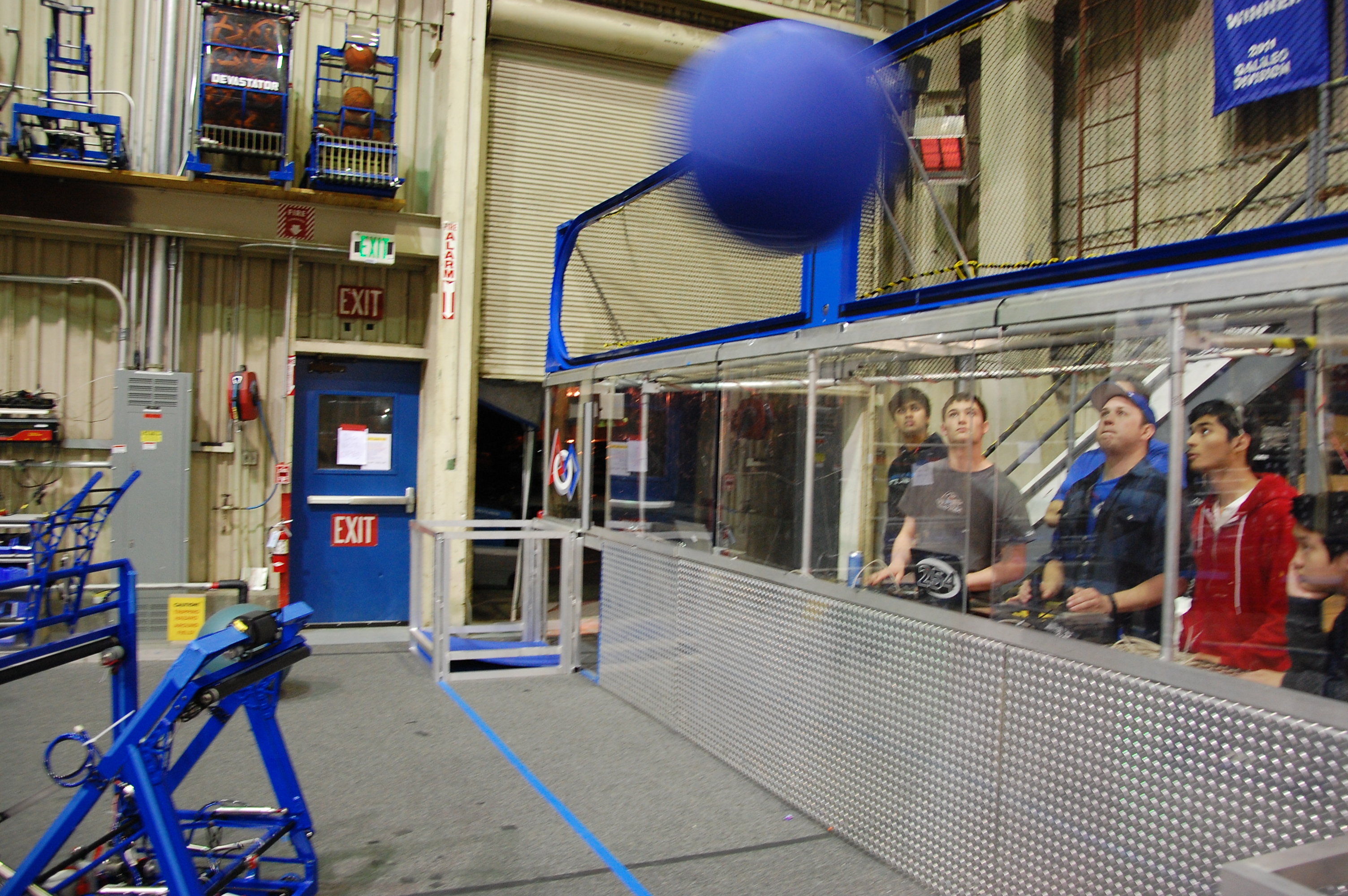
Field Setup
As for the field, the visiting teams would need to test their scoring in both goals, so the team added a net to the blue goal. This would keep the balls that are scored from damaging the parts and machines behind the goal and hurting any drivers below.

General Cleanup
The final part was cleaning the shelves and putting away the tools and parts. Organizing and cleaning the shelves will make it easier for the team and others to find parts, but it will also lessen the team’s struggles find parts in the future. For example, the team moved monitors from behind the driver control stations to the area near the drill presses \(the southern walls\). Upon realizing this created a mess as well, the team later moved those monitors outside and dismantled the shelves holding them. In addition, students moved the mess next to the east wall to the upper floor. This mess included the computer monitors plus the lost and found. Also, students vacuumed all floors, including the competition field, of all metallic bits. This was achieved using a combination of manual labor and the Roomba \(Consuela\). Finally , students built a new shelf for driver stations.

Actual Robot Work
Although most of today’s time was spent on cleaning, the team managed to machine some parts as well. Notably, the team got the flywheel powder coated and the bumper to work.
Additions to the Competition Pit
The programming team programmed the collage for the giant display screen in the pit during competitions.
Awards Submissions
The essay team worked on the Woodie Flowers essay today. They revised the latest draft, as the essay will be due on bag and tag day.
Action Items
- Check Trello for To-Do List
- Finish both robots
- Finish code for both the robot and the pit display screen
- Make the Flyer for both the robot and the team (Kevin, Godwin, and Jeremy)
- Make Technical Binder (Mani and Abhi)
- Help Mani and Jeremy finalize Woodie Flowers
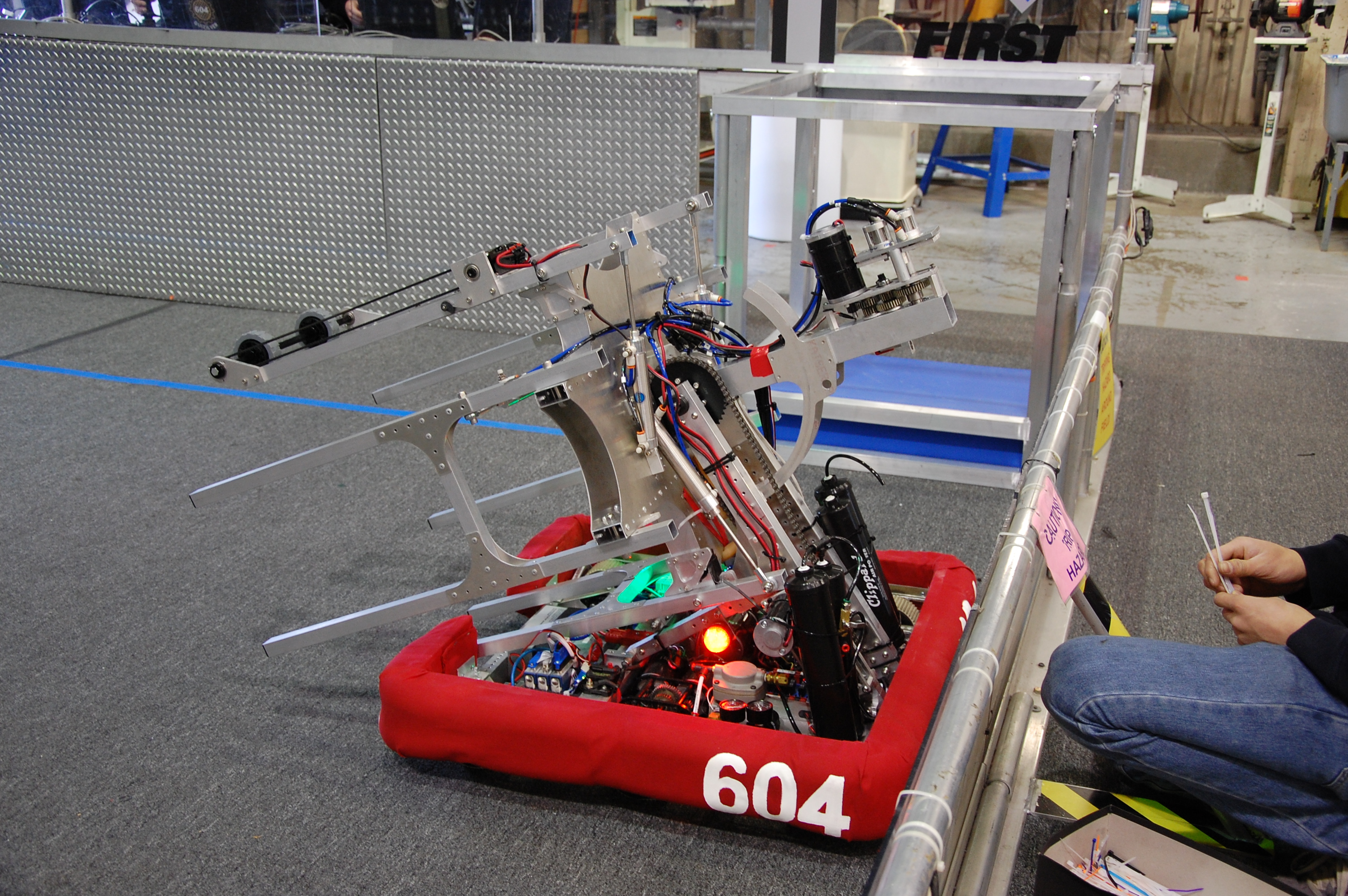
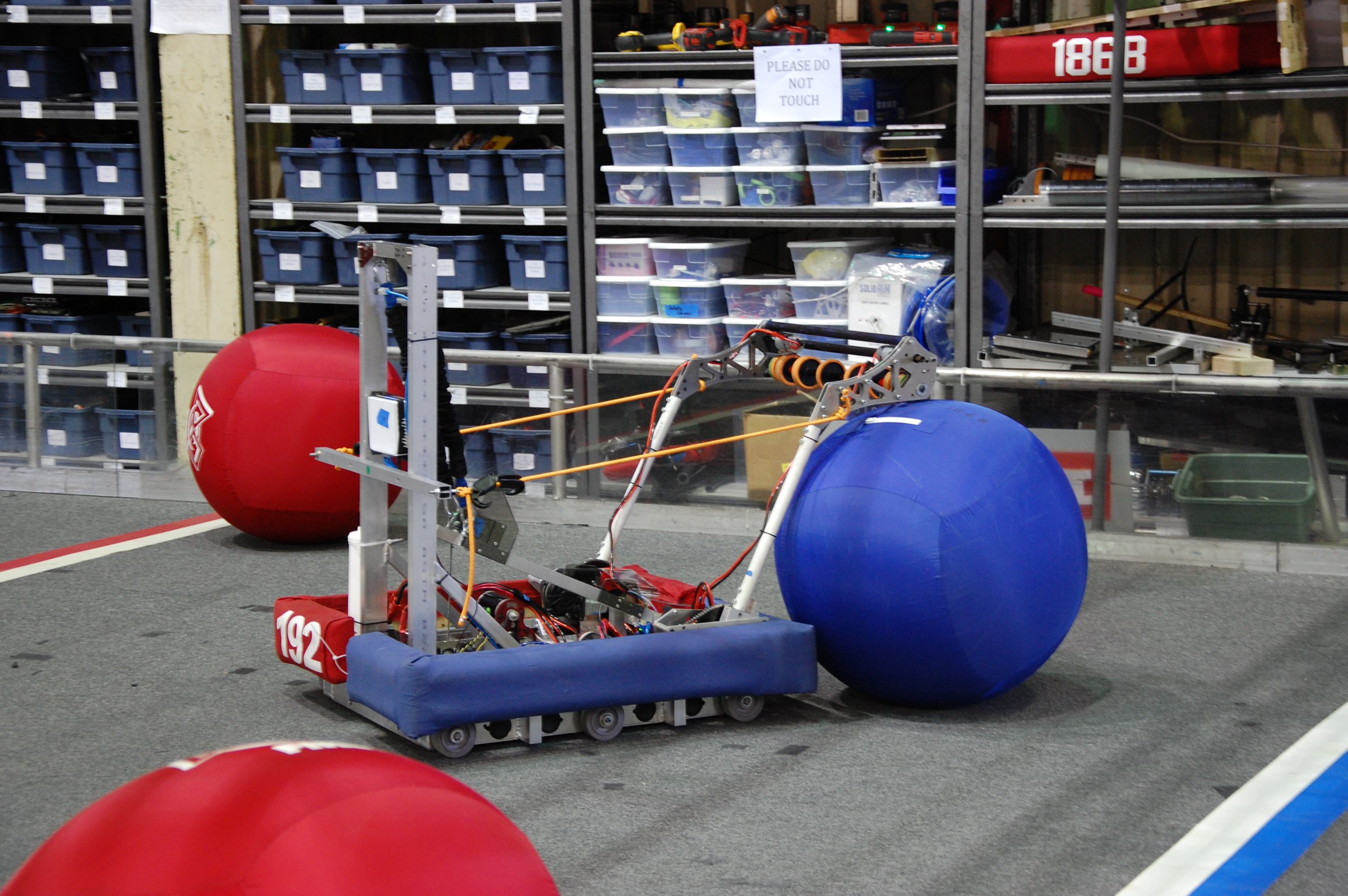
Day 43: Scrimmage Part 1
The Scrimmage
By Ryan Johnson, Louis Lin, and Alex Cherry
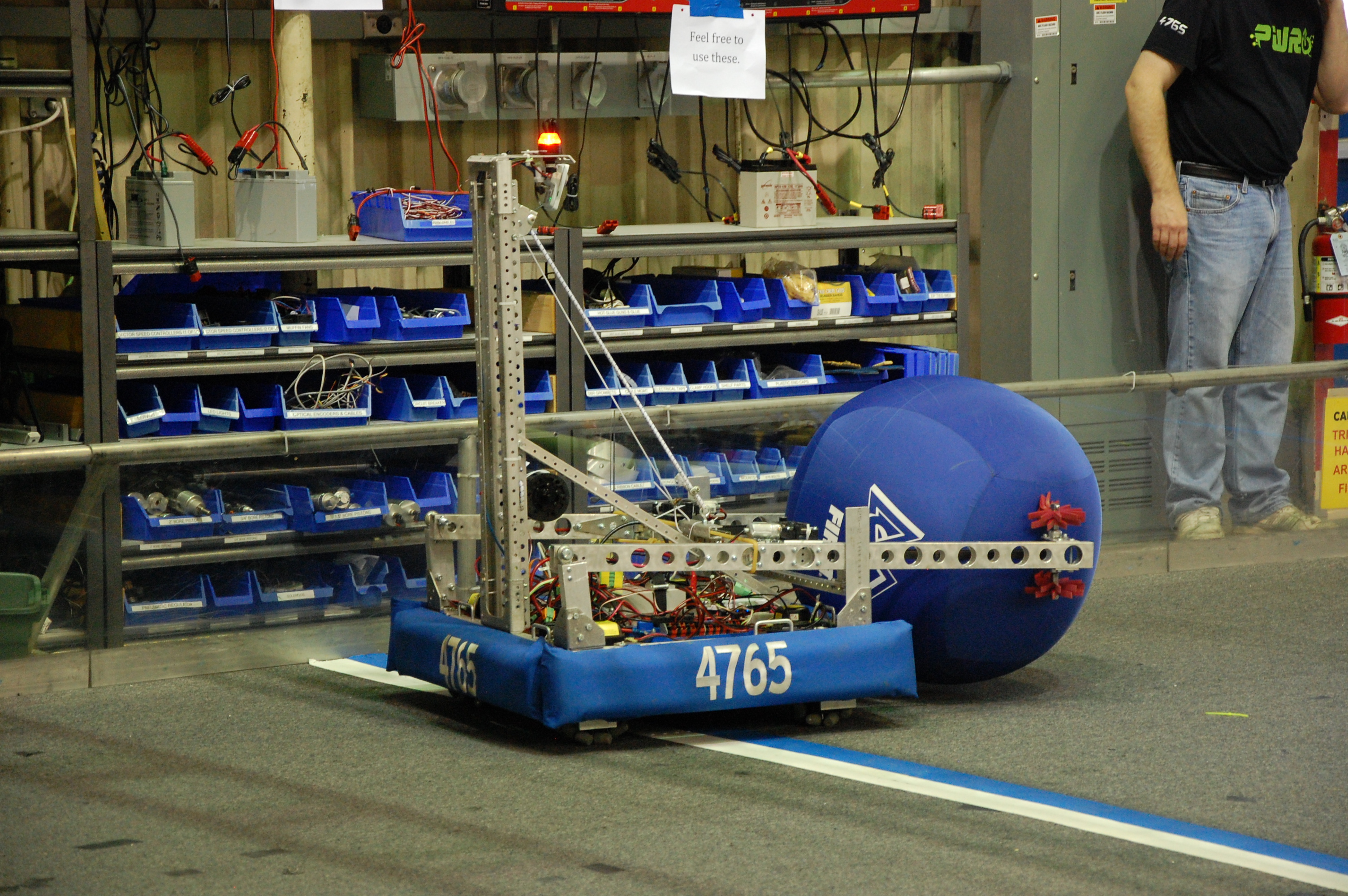
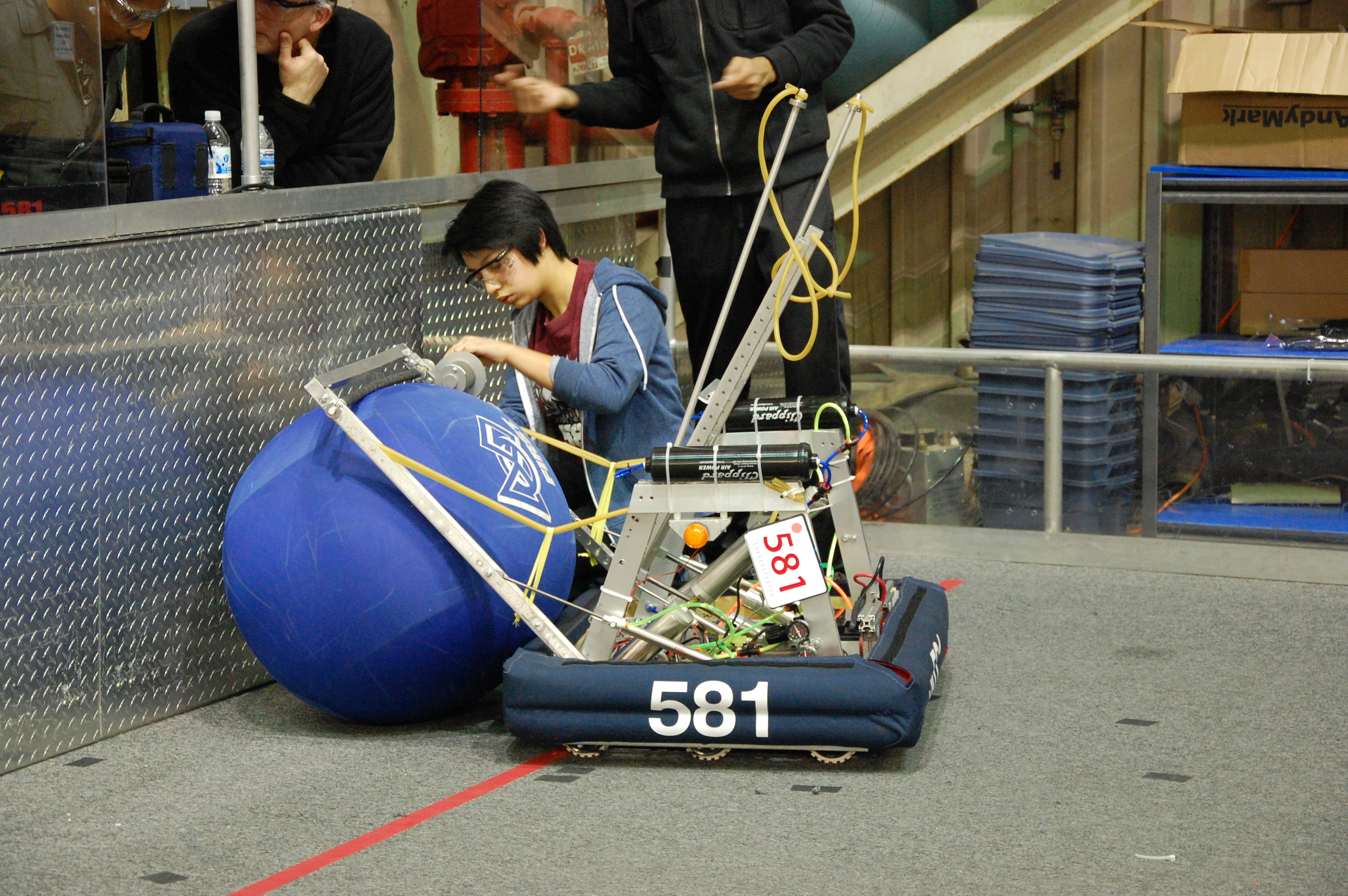
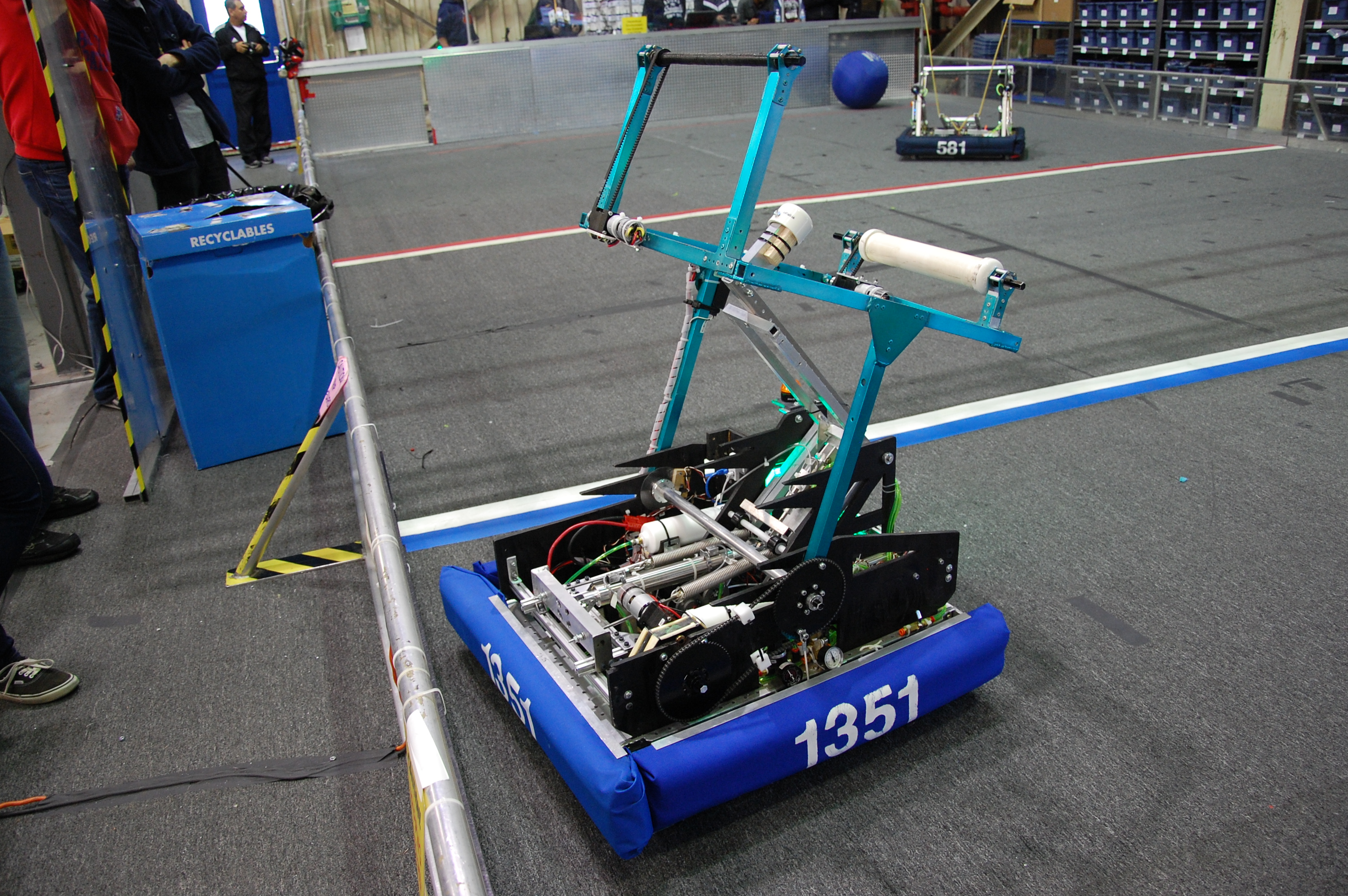
Team 604 (Quixilver), Team 192 (Gunn Robotics), Team 4765 (PWR up), Team 581 (Blazing Bulldogs), Team 1351 (TKO), Team 3501 (Firebird Robotics), Team 4990 (Gryphons), and Team 2813 (Gear Heads) all shared our lab today to practice on our almost full size field. Since most of the teams don’t have access to a field often (if at all), it allowed them to tune their robots so that they score, pass, catch, and move better.


Wiring and Assembly
While the other teams were testing their robots, we were finishing the wiring on our practice and competition robots. Specifically, we were working on wiring bump sensors and Intakes. We also worked on finishing the hood. Aside from a couple of parts and wires, the robot is mostly built.



Manufacturing
A Couple of our team members worked on manufacturing piston parts, and a couple of members worked on assembling the bumpers. The pistons that they are working on create a unique linkage between two pistons where one piston “locks” the other piston in place so that the rear intake can be locked up when shooting.
The bumper team started making two blue bumpers. Students affixed pool noodles along each side of the wood bumper frame with gaffers tape. Then, they stretched a full loop of cordura fabric around each bumper and stapled it down along the inside. Students took extra care to eliminate as many wrinkles as possible on the bumper fabric.
Shot Testing
As students tested the robot shooter, they noticed that the ball was being impeded by something before it touched the shooter flywheel. Using a slow\-motion camera, they were able to observe the process of the clappers pushing the ball up the shooter. Programmers adjusted the timing of the clappers to push the ball up vertically. Then, they adjusted the power of the clapper pistons to optimize each shot.
Action Items
\- Finish Assembling Bumpers
– Finish Assembling the robot
– Make Robot Flyers
– Make the Robot Binder
– Program the robot

Day 44: Scrimmage Wrap-Up
by Vidur Maheshwari ’17 and Joey Rodoni ’16
Scrimmage Complete
Today was the second and final day of the scrimmage. The team had a lot of fun working with and helping other teams. 254 saw some interesting designs and robots over the past weekend.



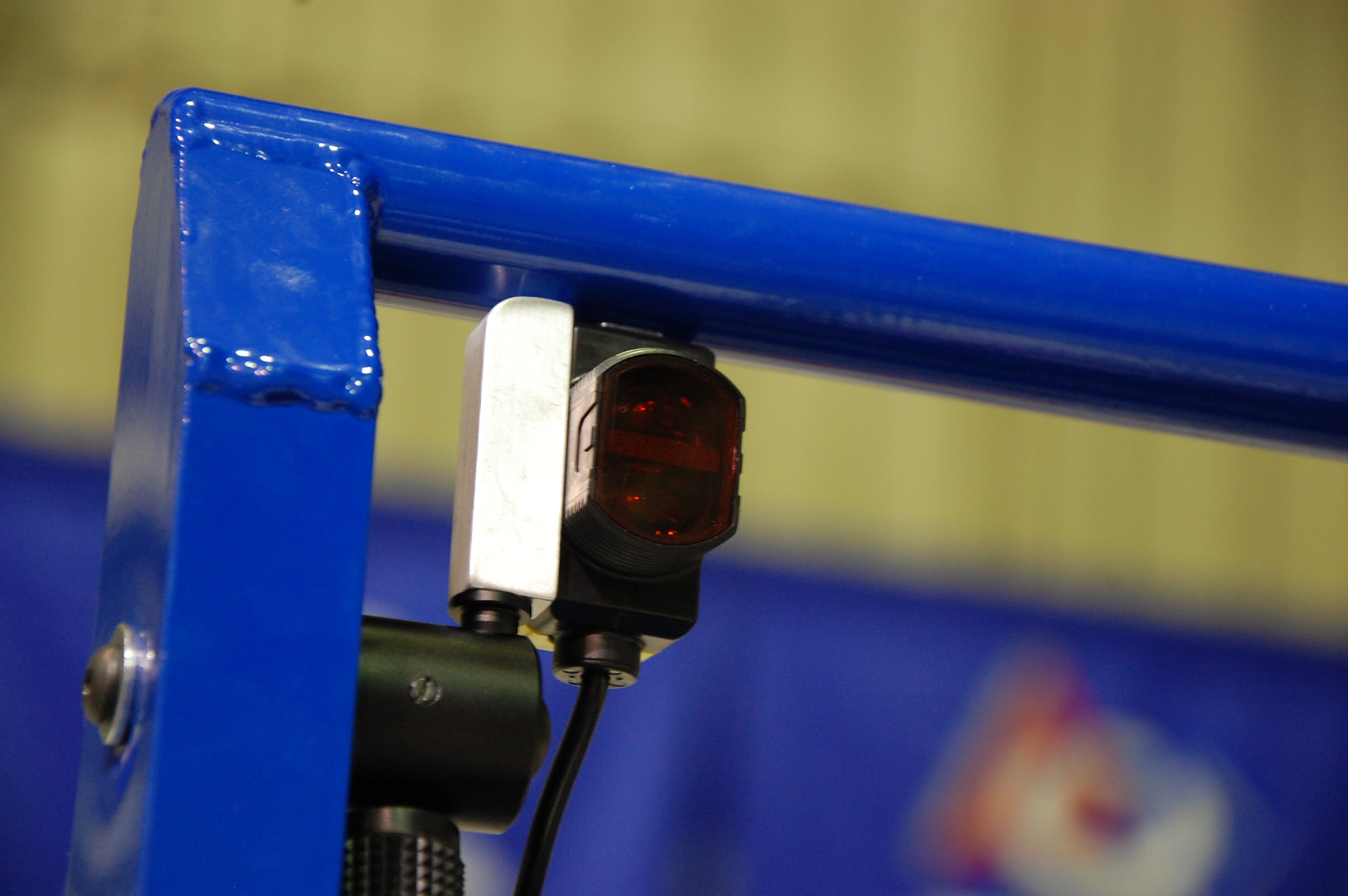
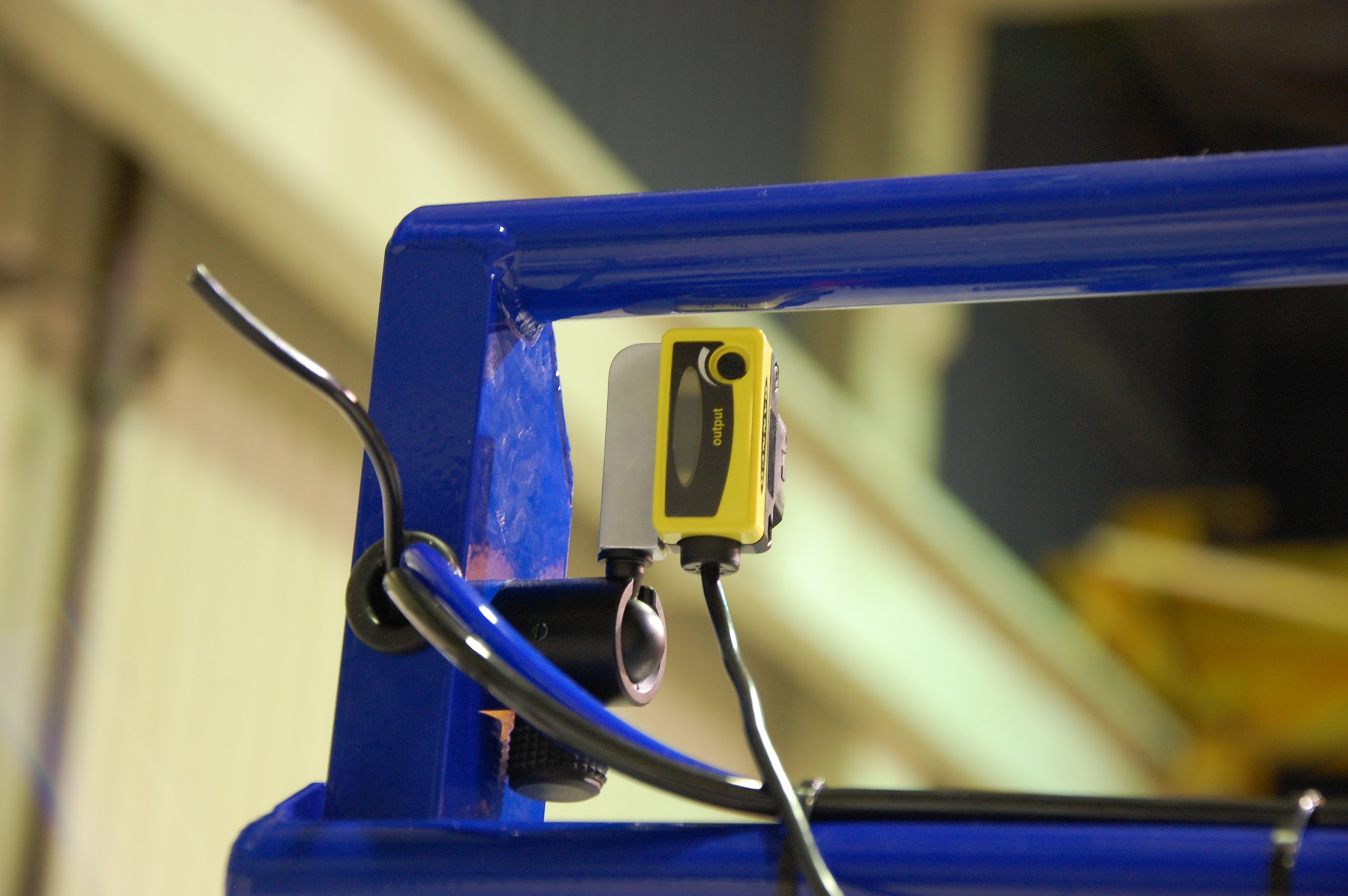
Hot Goal Sensors
Today students mounted the sensors that will check if a goal is hot during autonomous. Using these sensors the team will be able to score more points in autonomous mode. The sensor will locate the hot goal reflective tape with infrared lights and detectors.
Bumpers
Today the team finished both blue bumpers. The frame for the red bumper has been constructed.
Hot Goals
Today students mounted both hot goal indicators for the blue goal during the scrimmage.
Rear Intake
Finally, today the team finished building the rear intake by mounting the rear intake motor and adding the shield for that motor.
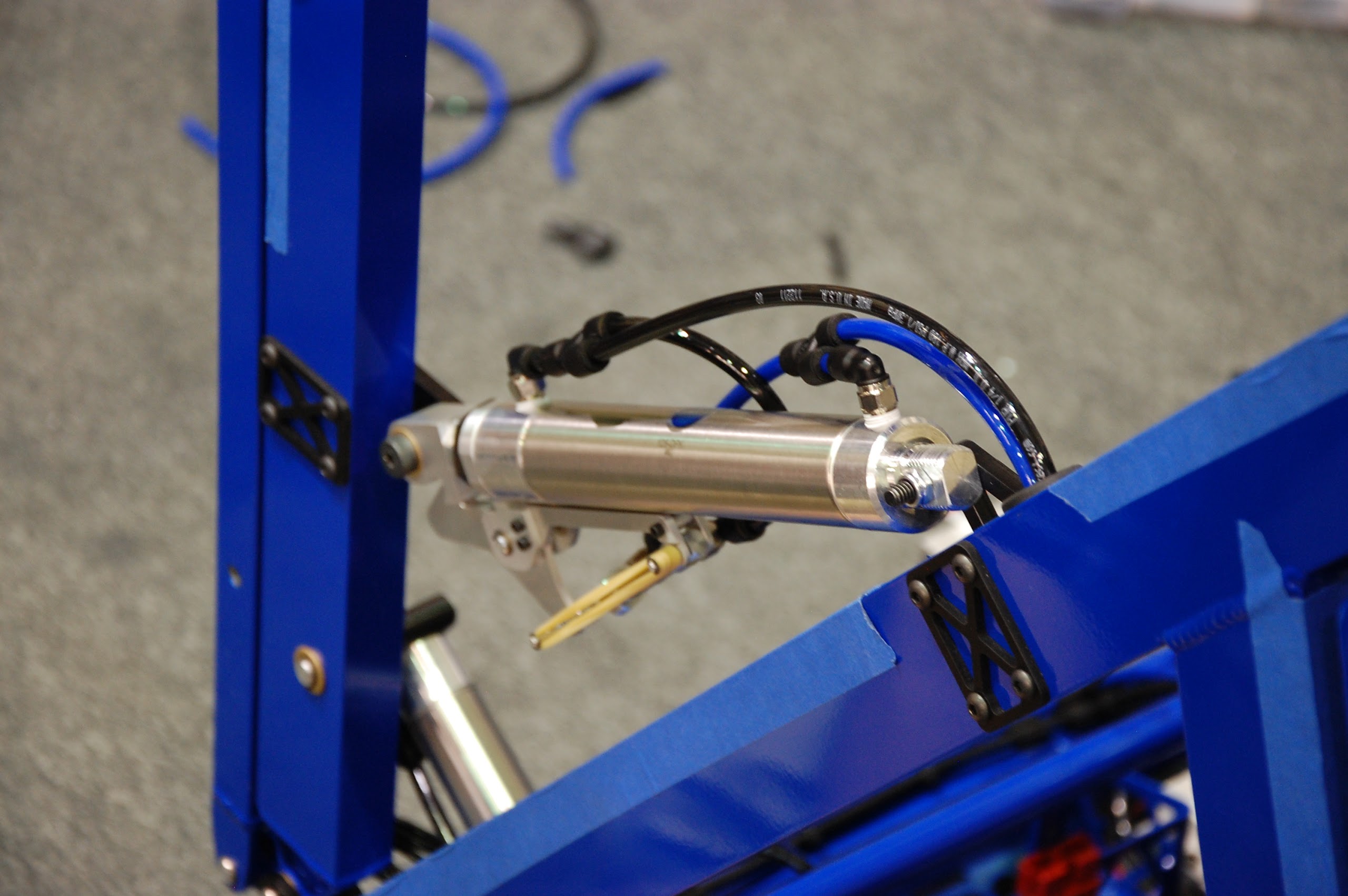
Xzibit Pistons
Today the team installed the catcher pistons on the competition robot and tested them. The pistons will open and close the catching portion of the robot. One piston on each side will move the actual frame and the other smaller piston will lock the piston in place.
Action Items
- check Trello for to-do list
- Finish the robot
- make side panels
- Finish the code
- Finish the robot pamphlet
- Make the technical binder
- Make the red bumper

The day after tomorrow the final stretch of build season begins. The team will have 48 hours to complete the robot before it must be bagged and tagged. This is a key milestone in the season.
