
FIRST Robotics Blog
Day #2: Finished Pyramid!
Today the team got a great start as soon as we could access the lab, making substantial progress on a multitude of projects.
Prototyping
Today in prototyping the team pursued our 3 designs decided yesterday for shooting mechanisms which are:
-
Radius design
-
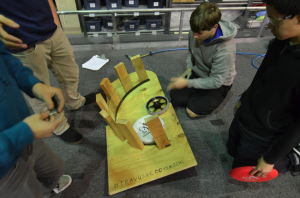
Continued to try and make shots using the pneumatic air wrench to
drive the flywheel
-
Used the strategy of touching the pyramid to take shots without being hit by opponent robots
-
Created a feeding device to automatically load frisbees into the shooter
-
-
Linear Design
-
CNC machined part of the belt mechanism to create a tensioned timing belt system to launch the frisbee
-
Added guide rails to create a solid static wall opposing the timing belt to create spin on the frisbee
-
Added flanges to the pulleys to help guide the timing belts
-
The pulleys are powered by a direct mounted CIM Motor running at 5300 RPM
-
Shows promising capabilities both in power and spin and is being pursued in greater depth

-

-
Arm Design
-
Completed initial prototype design
-
Mechanism is powered by a 1 stroke piston
-
Semi-effective at short range
-
Needs to be modified to increase range and spin to be able to get a better understanding of its capabilities

-

Design
The decision was made to build a modified version of the 2011 drive system which operated a 6 Wheel Drivetrain System with two speed gearboxes (high gear at 19.8fps, low gear at 7fps). Center wheels are lowered to allow for maximum maneuverability. 3.5″ wheels keep the robot center of gravity very low to the ground. Additional design improvements have been pushed to tomorrow for final decisions. The team is still in the process of brainstorming designs for both intake and climbing/hanging mechanisms.

The part drawings for the main shafts in our drivetrain are completed and ready to be sent out to sponsors. The completed drawings are for the following parts:
-
Drive Gearbox Output Shaft
-
Drive Gearbox Intermediate Shaft
-
Wheel Shaft Medium
-
Wheel Shaft Short
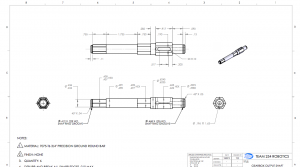
Output shaft drawing
Field Construction
Students completed all components and assembly of the pyramid, creating a solid basis for hanging prototype testing.

Machining
The CNC mill was used to mill components for the linear shooter prototype and is prepared to be in around-the-clock machining as soon as the preliminary metal shipment has arrived.
Programming
The programmers began to write some code in Java to deploy to the 2012 robot. They used the CommandBasedRobot structure for the code, and fixed all previous errors that popped up before during deployment. The code was deployed and ran successfully. Currently, the team has a completed drive subsystem and a couple drive commands. In addition, some students worked on a system to read values from a file for on-the-go constants editing.
Lab closing time for the night was at 1:00am
FRC Season Day #1: Kickoff
After the whole team kickoff-unveiling event at BCP, students came to the NASA lab at 1:00pm to begin discussing game strategy, going over the new game rules in detail, and began numerous design, prototyping and field assembly tasks throughout the course of the day. Prototyping A couple of groups were created which began making prototypes to test the fundamental concepts of shooting Frisbee discs. A few objective requirements that are being looked at in these designs include:
- Accuracy
- Precision
- Size/Volume occupied
- Power requirements
- Design integration ease
- Feeding/indexing/loading ease
- Need for adjustability
Three different designs are currently being prototyped:
Radius Design
- This design is very similar to this YouTube video
Radial Design
- The radial design uses a fixed wheel spinning on an axle surrounded by a circular track for a frisbee. By doing this there it simultaneously adds speed to the frisbee using the rotating wheel and spin using the far wall of the track that is padded with self-insulating electrical tape for increased grip.
- We used many different iterations of motors starting with Dewalt drills, but opted for more power using pneumatic drills running off shop air spinning the wheel at 5250 RPM.
- Using the higher RPM we were able to semi-accurately shoot from 10ft away from the high goal.
- A working prototype was created and tested today as shown in the video above
Linear Design
- This design is an iteration of the Radius design, but packaged more tightly to accelerate the Frisbee disc linearly, instead of around a radiused backboard
- The idea was created as a derivative of the Radius design, coming from the need for a compact shooting mechanism. Utilizing the same idea of a static surface combined with a spinning propellant, we designed a system that uses a direct mounted CIM motor to power a timing belt pulley system to increase speed of the frisbee in a single linear movement.
- CAD models of this design were completed and fabrication was started today
Thrower Arm Design
- This design is most similar to a clay pigeon device
- The main mechanism of this design is a flinging arm that propels the frisbee as it travels from the center of the device towards the outer most edge
- Fabrication of this design was started and photos will be added when a preliminary model is created
Design Preliminary design decisions were briefly discussed regarding drivetrain configuration, wheel size, and speeds/ratios. Final drivetrain decisions and preliminary designs for some drive components will be decided and completed at tomorrow’s meeting. Gearbox and wheel shaft models and drawings are scheduled to be completed by Sunday night, to deliver for manufacturing at our sponsor on Monday morning. Preliminary discussion outcomes:
- 6WD with 3.5″ Wheels
- 2-speed WCD (West Coast Drive)
- ~2011 speeds (with the capability to swap in a smaller pinion to go slower)
- Flat base plate
- 2011 style bumper mounts
Field Construction Students began working on building and assembling the high goal and the pyramid field objects. The High Goal stand was completed and mounted onto the game field. The assembly of the pyramid is underway, with its top goal almost complete; all components are made, but still need to be assembled together. 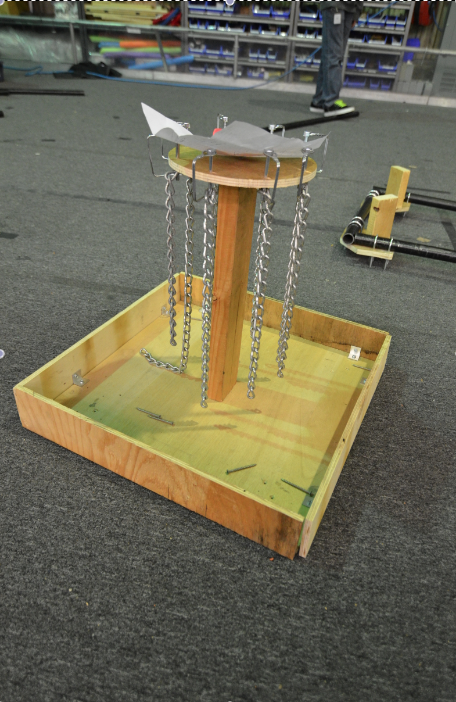 Manufacturing Final machine set-up and warm-up procedures were completed today which should allow us to start machining competiton parts tomorrow. Action Items for Tomorrow
Manufacturing Final machine set-up and warm-up procedures were completed today which should allow us to start machining competiton parts tomorrow. Action Items for Tomorrow
- Acquire missing pyramid parts, assemble pyramid base and goal, assemble pyramid.
- Complete linear Frisbee shooter prototype & test
- Begin intake design and prototyping discussions
- Start and complete drivetrain gearbox designs and shaft drawings
- Discuss merits and perform objective analysis/ranking on hanging mechanisms & feasibility
Lab closing time for the night was at 12:30am
Team 254 Helps out at Toys for Tots
On Saturday December 22nd, 27 Cheesy Poofs came together to help needy children in the Santa Clara Valley. The members donated over 70 hours to help distribute gifts to the needy and bring smiles to their faces. The boys were painting faces and hands with Christmas scenes, running games with prizes, cooking hot dogs, distributing food and demoing Skyfire to the delight of all ages. This is the 25th Annual US Marines Toys for Tots event at the Fairgrounds and it was expected to reach 7,000-9,000 children.
SIA Awards Dinner
 Last Thursday night, Team 254 attended Semiconductor Industry Association’s 35th Annual Awards Dinner, where we met Dean Kamen, spoke about FIRST, and spread the message of STEM.
Last Thursday night, Team 254 attended Semiconductor Industry Association’s 35th Annual Awards Dinner, where we met Dean Kamen, spoke about FIRST, and spread the message of STEM.
We were lucky enough to be invited to SIA’s 35th Award Dinner and Reception, where we talked about FIRST, STEM, and the Cheesy Poofs. The event was hosted at the Fairmont Hotel, and gathered many prominent people in the engineering community together. Dean Kamen, the founder of FIRST (and creator of the Segway) spoke, as well as our mentor, Travis Covington. Our drive team, Abhi and Chris, spoke about the more mechanical topics, while Nagy and I spoke about how the game works, how the team is run, and how we interact with sponsors. Overall, the night was a huge success, allowing the Poofs, Bellarmine, and FIRST to be exposed to an amazing set of people. It was a night that will definitely be remembered.
Members Avery Strand, Abhi Kumar, Chris Sides, Nagy Hakim
Mentors Travis Covington, Ann Roemer
CalGames 2012

This past weekend Team 254 attended CalGames 2012 at Woodside High School, an off-season replay of the FRC game Rebound Rumble.
After 4 wins and 4 losses in qualification matches, 254 was the first alliance choice for the #1 seed, Team 971. Later joined by Team 766, the #1 alliance proceeded through the elimination matches, defeating the #8 alliance, #5 alliance, and the #2 alliance in 2 matches each. This marks the fourth year in a row that Team 254 has been a champion at CalGames.

Thank you to all the team members, parents, mentors, and friends who represented Team 254 at CalGames! We could not have done it without the hard work of all our students, including all of the scouts, pit crew, drive team, and more. A special thanks to the volunteers and mentors who donated their time and energy to help Team 254 work smoothly throughout the competition. I hope all our members enjoyed their first taste of FRC this year, and are looking forward to a fantastic 2013 season!
Calgames – Happening Now
This weekend, Team 254 is competing in the 12th annual WRRF Calgames Offseason Tournament. Watch the webcast of the tournament here!
FRC Pre-Season Planning
As the robotics school year ramps up the FRC team is also planning for next season. We will be having a planning meeting in the near future so check your emails for any upcoming event. This meeting will discuss any issues we had last season and possible solutions to them for the season to come. We will also discuss possible alternative projects for FRC Fridays to complete prior to next season.
Shockwave Update
There was some difficulty using shockwave today. The connections were working, but the motors would not turn. A group of us troubleshooted this through the afternoon, but to no avail. Hopefully we can get it back up and runnning soon.

FRC Fridays
 As the new school year begins, all aspects of the Bellarmine Robotics Team go into full bloom. Along side other major subjects such as Finance, VEX, Graphic Design, and of course FRC. Soon we will be establishing FRC Fridays as a way for both new and old members to be introduced into FRC in the offseason and get involved in the program. In our near future we will be finishing upgrades designed throughout the summer with Shockwave and will continue on to other projects needing to be finished prior to the beginning of the FRC season. Stay tuned for updates and upcoming times and locations for FRC Fridays.
As the new school year begins, all aspects of the Bellarmine Robotics Team go into full bloom. Along side other major subjects such as Finance, VEX, Graphic Design, and of course FRC. Soon we will be establishing FRC Fridays as a way for both new and old members to be introduced into FRC in the offseason and get involved in the program. In our near future we will be finishing upgrades designed throughout the summer with Shockwave and will continue on to other projects needing to be finished prior to the beginning of the FRC season. Stay tuned for updates and upcoming times and locations for FRC Fridays.
FRC Offseason Events
With the robotics season about to begin, Team 254 is set to attend two off season FRC tournaments for the 2012 game Rebound Rumble. Over the next few weeks we will begin preparing and packing for CalGames 2012, which is scheduled to begin October 12th. As the only local FRC tournament in the fall, every team member is expected to attend to show their support for the Cheesy Poofs. After CalGames, Team 254 will travel down to Madera for another annual off season tournament, Madtown Throwdown. In addition to FRC, a planning meeting for the annual Bellarmine VEX Tournament will happen within the next few weeks.
Upcoming Intro Meetings
There are two upcoming meetings introducing 254 robotics to potential recruits on the following days:
- Wednesday August 22nd
- Thursday August 23rd
At these meetings we will showcase our 2011-2012 basketball shooting robot Skyfire as well as give important information about the team.
San Jose Sharks Street Rally
Team 254’s T-Shirt Cannon made an appearance in San Jose today at a Street Rally for the San Jose Sharks, a professional hockey team. The Sharks play their first home game today against the Atlanta Thrashers and celebrated the occasion with a pre-game street rally.
The rally was a ton of fun and the robot was quite popular.
Technical Specifications
Features:
- Ten Barrel Revolver/Gatling Action
- Automatic Barrel Indexing
- Motorized Adjustable Pitch – Horizontal to +60 degrees
- Adjustable Range Control Via Electronic Solenoid Valve
- Six-Wheel Drive, Off-Road Capable Chassis
- Wireless Control
- Capable of launching 3+ T-Shirts per second
- Also Capable of launching racquetballs or hacky sacks
Technical Specifications:
General
- Dimensions: 28″ Wide, 38″ Long, 18″ Tall
- Weight: 160 Pounds
- Top Speed: 12+ Feet Per Second
- Capacity: 200+ Shots per Tank
- Projectile Range: 150+ Yards
Mechanical
- Qty 10 – 2.5″ OD, 2.375″ ID Barrels x 24″ Long
- Globe Motor Barrel Revolver Mechanism
- Van Door Motor Pitch Adjustment
- Pneumatic Cylinder Indexing/Lock
- Gas Spring Assisted Pitch
- High Pressure SCUBA Tank Reservoir at ~3300 psi
- Low Pressure Regulated SCUBA Tank Accumulator at ~120 psi
- 1″ NPT MAC Solenoid Valve at ~17.0 cV Flow Capacity with a 23 ms Response Time
- Norgren Low Pressure Regulator for Cylinder Indexing
- H2Oddysey Tank Mounted SCUBA Regulator
Electrical
- Power Source: 12 Volt, 17 AH SLA Motorcycle Battery
- Controller: VEX PIC Micro-controller with VEXNet
- Wireless Protocol: 802.11 g Wi-Fi @ 2.4 ghz
- VEX Pro Victor Speed Controllers
- VEX Pro Spike Relay Modules
- 12 Volt MAC Solenoid Valve for T-Shirt Launching
- 12 Volt Rexroth Solenoid Valve for Cylinder Indexing
About Shockwave

In Summer 2010, Team 254 decided to build a T-Shirt Shooting Robot to be used for promotional events. After two months of hard work, our robot debuted at a spirit rally at our school, Bellarmine College Prep in San Jose. The robot was received very well and was loved by the students at the rally.
Team 254 plans to use its T-Shirt Cannon Robot to promote the team and its sponsors. We will be bringing the cannon to team and school events as well as sponsor events.
For detailed information about the design and build process as well as the cannon’s technical specifications, please visit the following pages:
Bellarmine Spirit Rally
The T-Shirt Cannon made its debut tonight at the Bellarmine Spirit Rally. Set before the school’s football game against its rival, St. Francis of Mountain View, the rally aims to boost school spirit and morale before the game.
The T-Shirt Cannon came out in the middle of the rally and shot 30 T-Shirts at students stationed across the gym. The students aimed to catch the T-Shirts in trash cans in order to win spirit points.
The rally was a great success and the T-Shirt Cannon was a huge hit!
Robot Complete
After more than two months of hard work, Team 254’s T-Shirt Cannon is complete.
Today, we recieved the parts neccesary for us to fill our high-pressure SCUBA tank. After filling the tank, we tested the robot extensively to determine how many shots could be taken on a single air fill. On one air fill, the robot can shoot more than 200 shots, well above our initial estimates.
We are very pleased with how the robot turned out and look forward to using it to promote our team, our school, our sponsors and our community.
First Shots
The robot took its first shots today, shooting racquetballs. The robot shot extremely far, with distances yet to be officially measured.
For today’s shots, the robot’s tanks were filled by a shop compressor in the lab to approximately 100 psi. Early next week, we hope to start powering the shots off of the SCUBA tank.
Indexing & Tilting
After many days of work, the robot is almost complete. Today, we completed the indexing and tilting mechanisms and tested the robot in the lab without a projectile. The whole system seems to be working great.
Revolver Mounted
A ton of progress was made today on the robot. The valve block was tapped for the 1″ NPT hose. Furthermore, we were able to get the pivot shaft for the revolver completed so that we could mount the revolver on the base.
In the next few days, we hope to complete the indexing and tilting actions of the revolver.
Programming, Machining & More
Today, at the lab, we started programming the VEX controller on the robot. We finished the drive code and wrote simple code to open the main valve for a certain number of milliseconds when a button is pressed. Furthermore, the VEX controller was wired to the main robot power source after we confirmed with VEX that the controller will run off of 12V.
The main valve block is almost done with machining. All of the operations on the CNC Mill are complete and all that remains is tapping the pipe threads into the hole for the main hose, which will happen in the next few days.
Today, we got the main hoses in the mail as well as our scuba regulator. We hooked up the scuba regulator to the high pressure tank and found a 3/8″ UNC fitting that would connect to the regulator. We then connected it to the low pressure tank with the hose.
