
Day #22: Prototyping & Intermediate Shaft Spacers
Machining
The students and mentors finished machining the intermediate shaft spacers. After ordering gear box shafts from a sponsor, the team decided to manufacture twice as many to take the PTO into account. Because we are not able to manufacture a hex into the round part of a shaft with the tools at the lab, students are instead making our own out of a hex shaft and placing a spacer on one end to prevent the gear from moving. Members also unsuccessfully searched for hex bearings from the storage crates.
![IMG_20130129_220806[1]](http://media.team254.com/2013/01/1d5c0478-IMG_20130129_2208061.jpg)
The newly manufactured shaft spacers
Prototyping
Students also worked on the shooter indexer. The two side blocks for the outer indexer had to be replaced, as the previous wooden blocks were not long enough. Students successfully got the shaft through both parts of the prototype, such that the smaller one can pivot. The next step for this project is to attach the pneumatic pistons to the main frame of the prototype.
![IMG_20130129_220706[1]](http://media.team254.com/2013/01/23d204cd-IMG_20130129_2207061.jpg)
Students assembling the shooter indexing prototype
![IMG_20130129_220720[1]](http://media.team254.com/2013/01/1faf04f9-IMG_20130129_2207201.jpg)
The intake prototype
Programming
The programmers tested the gyro and were able to get accurate results from it. They also retrieved the two S4 drive encoders from Skyfire for future use and storage. In addition, they finished translating the state space controller from C++ to Java. Though the new code has not yet been explicitly tested, it compiles fine. More tests will be done at a later time.
Next, the programming team tested out the bang-bang controller, which controls the 2012 robot’s shooter wheel. They also tested the graphing tool within the Smart Dashboard and made it display the velocity of the shooter wheel versus time.
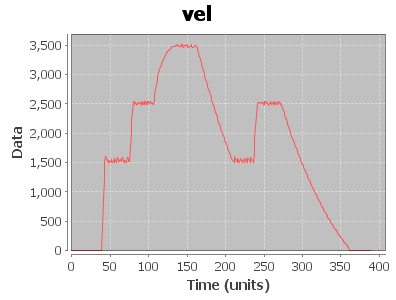
Velocity (rpm) of the shooter wheel vs. time
Action Items
- Finish constructing shooter indexing prototype
