
VEX Simulator
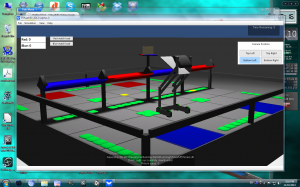 VirtualVEX is a powerful, expandable VEX Robotics simulator tailored for VRC teams, developed by Team 254. Originally created for the 2011-2012 Gateway season, the software has been constantly updated and now runs a simulation of the Sack Attack game. VirtualVEX is designed with VEX teams in mind: it works with up to 2 USB joysticks and features virtual robots based upon common designs. Also, users can download their own driver control code to the virtual robot, either to customize controls or test out their software before deploying it to an actual robot. VirtualVEX eliminates the need for a costly and space-consuming practice field, and because it is free, it provides a sustainable solution for teams of all sizes. Finally, VirtualVEX is open-source, meaning any user can obtain the original source code, either for reference or to make deeper-level customizations.
VirtualVEX is a powerful, expandable VEX Robotics simulator tailored for VRC teams, developed by Team 254. Originally created for the 2011-2012 Gateway season, the software has been constantly updated and now runs a simulation of the Sack Attack game. VirtualVEX is designed with VEX teams in mind: it works with up to 2 USB joysticks and features virtual robots based upon common designs. Also, users can download their own driver control code to the virtual robot, either to customize controls or test out their software before deploying it to an actual robot. VirtualVEX eliminates the need for a costly and space-consuming practice field, and because it is free, it provides a sustainable solution for teams of all sizes. Finally, VirtualVEX is open-source, meaning any user can obtain the original source code, either for reference or to make deeper-level customizations.
To find out more about VirtualVEX and download the latest version, please visit the VirtualVEX website: sites.google.com/site/virtualvex
